《2020高考物理一輪總復(fù)習(xí) 第五章 機(jī)械能 能力課2 機(jī)械能守恒定律練習(xí)(含解析)新人教版》由會(huì)員分享���,可在線閱讀���,更多相關(guān)《2020高考物理一輪總復(fù)習(xí) 第五章 機(jī)械能 能力課2 機(jī)械能守恒定律練習(xí)(含解析)新人教版(16頁珍藏版)》請?jiān)谘b配圖網(wǎng)上搜索。
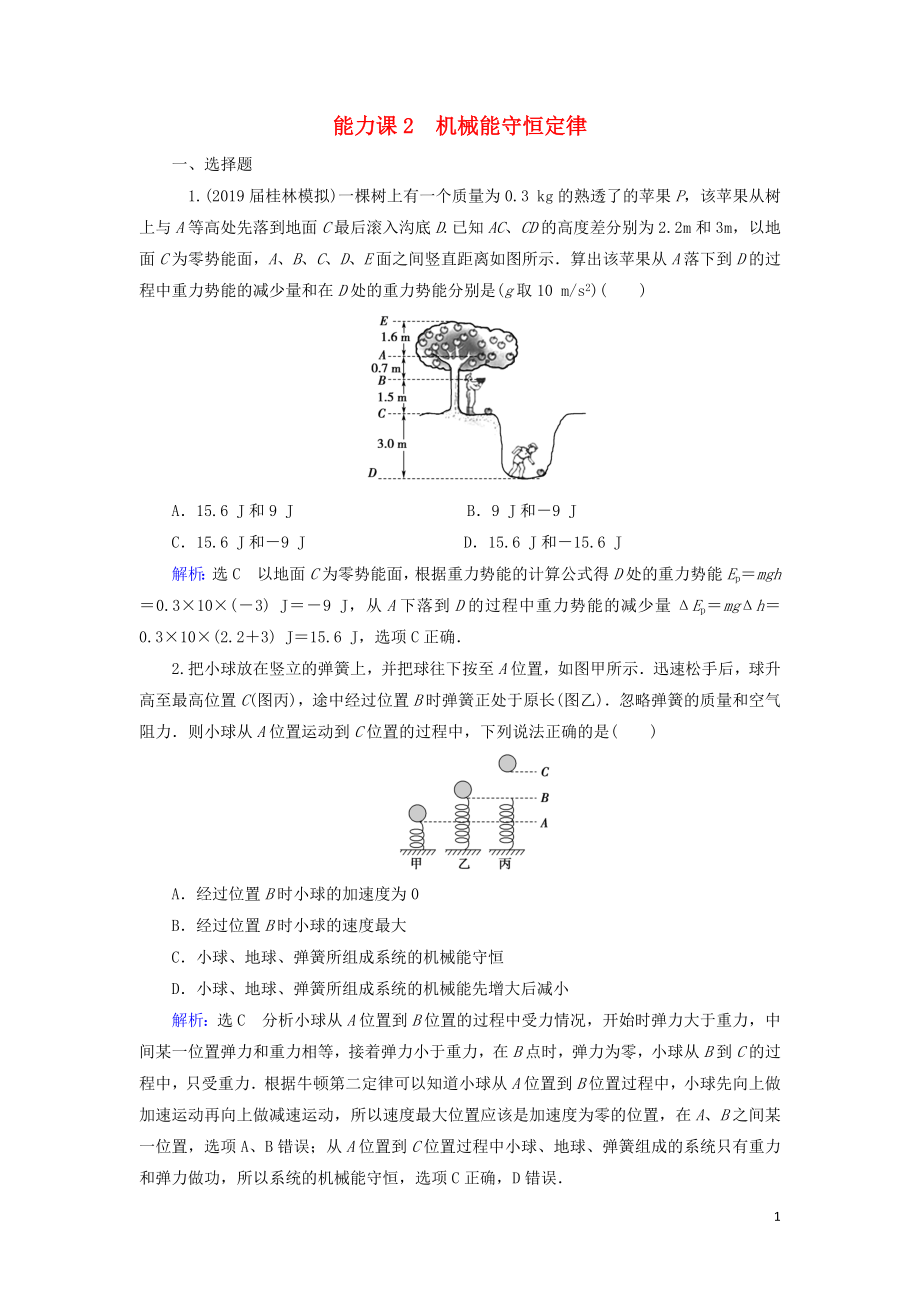
1���、能力課2 機(jī)械能守恒定律一���、選擇題 1.(2019屆桂林模擬)一棵樹上有一個(gè)質(zhì)量為0.3 kg的熟透了的蘋果P,該蘋果從樹上與A等高處先落到地面C最后滾入溝底D.已知AC���、CD的高度差分別為2.2 m和3 m���,以地面C為零勢能面,A���、B���、C���、D���、E面之間豎直距離如圖所示算出該蘋果從A落下到D的過程中重力勢能的減少量和在D處的重力勢能分別是(g取10 m/s2)()A15.6 J和9 JB9 J和9 JC15.6 J和9 J D15.6 J和15.6 J解析:選C以地面C為零勢能面���,根據(jù)重力勢能的計(jì)算公式得D處的重力勢能Epmgh0.310(3) J9 J,從A下落到D的過程中重力勢能的減少量E
2���、pmgh0.310(2.23) J15.6 J���,選項(xiàng)C正確2.把小球放在豎立的彈簧上,并把球往下按至A位置���,如圖甲所示迅速松手后���,球升高至最高位置C(圖丙),途中經(jīng)過位置B時(shí)彈簧正處于原長(圖乙)忽略彈簧的質(zhì)量和空氣阻力則小球從A位置運(yùn)動(dòng)到C位置的過程中���,下列說法正確的是()A經(jīng)過位置B時(shí)小球的加速度為0B經(jīng)過位置B時(shí)小球的速度最大C小球���、地球、彈簧所組成系統(tǒng)的機(jī)械能守恒D小球���、地球���、彈簧所組成系統(tǒng)的機(jī)械能先增大后減小解析:選C分析小球從A位置到B位置的過程中受力情況���,開始時(shí)彈力大于重力,中間某一位置彈力和重力相等���,接著彈力小于重力,在B點(diǎn)時(shí)���,彈力為零���,小球從B到C的過程中,只受重力根據(jù)牛頓第
3���、二定律可以知道小球從A位置到B位置過程中���,小球先向上做加速運(yùn)動(dòng)再向上做減速運(yùn)動(dòng),所以速度最大位置應(yīng)該是加速度為零的位置���,在A���、B之間某一位置,選項(xiàng)A���、B錯(cuò)誤���;從A位置到C位置過程中小球、地球���、彈簧組成的系統(tǒng)只有重力和彈力做功���,所以系統(tǒng)的機(jī)械能守恒,選項(xiàng)C正確���,D錯(cuò)誤3.(多選)(2018屆湖南郴州一中模擬)一蹦極運(yùn)動(dòng)員身系彈性蹦極繩從水面上方的高臺(tái)下落���,到最低點(diǎn)時(shí)距水面還有數(shù)米距離假定空氣阻力可忽略,運(yùn)動(dòng)員可視為質(zhì)點(diǎn)���,下列說法正確的是()A運(yùn)動(dòng)員到達(dá)最低點(diǎn)前重力勢能始終減小B蹦極繩張緊后的下落過程中���,彈力做負(fù)功���,彈性勢能增加C蹦極過程中,運(yùn)動(dòng)員���、地球和蹦極繩所組成的系統(tǒng)機(jī)械能守恒D蹦極過程中���,
4、重力勢能的改變量與重力勢能零點(diǎn)的選取有關(guān)解析:選ABC在運(yùn)動(dòng)員到達(dá)最低點(diǎn)前���,運(yùn)動(dòng)員一直向下運(yùn)動(dòng)���,根據(jù)重力勢能的定義可知重力勢能始終減小,故選項(xiàng)A正確���;蹦極繩張緊后的下落過程中���,彈力方向向上,而運(yùn)動(dòng)員向下運(yùn)動(dòng)���,所以彈力做負(fù)功���,彈性勢能增加���,故選項(xiàng)B正確;對(duì)于運(yùn)動(dòng)員���、地球和蹦極繩所組成的系統(tǒng)���,蹦極過程中只有重力和彈力做功���,所以系統(tǒng)機(jī)械能守恒���,故選項(xiàng)C正確;重力做功是重力勢能轉(zhuǎn)化的量度���,即WGEp���,而蹦極過程中重力做功與重力勢能零點(diǎn)的選取無關(guān),所以重力勢能的改變量與重力勢能零點(diǎn)的選取無關(guān)���,故選項(xiàng)D錯(cuò)誤4.(多選)(2018屆山東山師附中三模)如圖所示���,質(zhì)量為m的a���、b兩球固定在輕桿的兩端,桿可繞O點(diǎn)
5���、在豎直面內(nèi)無摩擦轉(zhuǎn)動(dòng)���,已知兩物體距O點(diǎn)的距離L1L2,現(xiàn)在由圖示位置靜止釋放���,則在a下降過程中()Aa���、b兩球的角速度大小始終相等B重力對(duì)b球做功的瞬時(shí)功率一直增大C桿對(duì)a做負(fù)功,a球機(jī)械能不守恒D桿對(duì)b做負(fù)功���,b球機(jī)械能守恒解析:選ACa���、b兩球同時(shí)繞O點(diǎn)轉(zhuǎn)動(dòng),角速度大小始終相等���,故A正確���;剛開始���,b的速度為0,重力對(duì)b球做功的瞬時(shí)功率為0���,在豎直位置���,速度與重力方向垂直,重力對(duì)b球做功的瞬時(shí)功率為0���,所以重力對(duì)b球做功的瞬時(shí)功率先增大后減小,故B錯(cuò)誤���;在a下降過程中���,b球的動(dòng)能增加,重力勢能增加���,所以b球的機(jī)械能增加���,根據(jù)重力之外的力做功量度物體機(jī)械能的變化,所以桿對(duì)b做正功���,球a和b系統(tǒng)
6���、機(jī)械能守恒���,所以a機(jī)械能減小,所以桿對(duì)a做負(fù)功���,故D錯(cuò)誤���,C正確5.(多選)(2019屆揭陽市揭東一中檢測)如圖,兩個(gè)相同小物塊a和b之間用一根輕彈簧相連���,小物塊a和b及彈簧組成的系統(tǒng)用細(xì)線靜止懸掛于足夠高的天花板下細(xì)線某時(shí)刻被剪斷���,系統(tǒng)下落,已知重力加速度為g���,則()A細(xì)線剪斷瞬間���,a和b的加速度大小均為gB彈簧恢復(fù)原長時(shí),a和b的加速度大小均為gC下落過程中彈簧一直保持拉伸狀態(tài)D下落過程中a、b和彈簧組成的系統(tǒng)機(jī)械能守恒解析:選BD開始時(shí)系統(tǒng)處于平衡狀態(tài)���,彈簧的彈力大小等于物塊b的重力mg���,當(dāng)細(xì)線剪斷瞬間,彈簧不能突變���,則物塊b受力仍然平衡���,加速度為零,而a受向下的重力和拉力作用���,加速度為
7���、2g���,故A錯(cuò)誤���;彈簧恢復(fù)原長時(shí),兩物塊均只受重力���,故加速度大小為g���,由于此時(shí)物塊a的速度大于b的速度���,故此后一段時(shí)間彈簧處于壓縮狀態(tài),故B正確���,C錯(cuò)誤���;對(duì)a、b和彈簧組成的系統(tǒng)來說���,由于只有重力和彈簧彈力做功���,故機(jī)械能守恒,故D正確6.(多選)如圖所示���,半徑為R的光滑半圓形軌道和光滑水平軌道相切���,三個(gè)小球1、2���、3沿水平軌道分別以速度v12���、v23���、v34水平向左沖上半圓形軌道,g為重力加速度���,下列關(guān)于三個(gè)小球的落點(diǎn)到半圓形軌道最低點(diǎn)A的水平距離和離開軌道后的運(yùn)動(dòng)形式的說法正確的是()A三個(gè)小球離開軌道后均做平拋運(yùn)動(dòng)B小球2和小球3的落點(diǎn)到A點(diǎn)的距離之比為 2C小球1和小球2做平拋運(yùn)動(dòng)的時(shí)間之
8���、比為11D小球2和小球3做平拋運(yùn)動(dòng)的時(shí)間之比為11解析:選BD設(shè)小球恰好通過最高點(diǎn)時(shí)的速度為v,此時(shí)由重力提供向心力���,則mgm���,得v設(shè)小球能通過最高點(diǎn)時(shí)在軌道最低點(diǎn)的最小速度為v,由機(jī)械能守恒定律得2mgRmv2mv2得v由于v12v���,所以小球1不能到達(dá)軌道最高點(diǎn),也就不能做平拋運(yùn)動(dòng)���,故A���、C錯(cuò)誤���;小球2和小球3離開軌道后做平拋運(yùn)動(dòng),由2Rgt2���,得t2���,則得小球2和小球3做平拋運(yùn)動(dòng)的時(shí)間之比為11,故D正確���;設(shè)小球2和小球3通過最高點(diǎn)時(shí)的速度分別為v2和v3根據(jù)機(jī)械能守恒定律得2mgRmv22mv222mgRmv32mv32解得v2���,v32由平拋運(yùn)動(dòng)規(guī)律得水平距離為xv0t,t相等���,則小球2
9���、和小球3的落點(diǎn)到A點(diǎn)的距離之比為2.故B正確7.(多選)(2018屆南京市、鹽城市一模)如圖所示���,光滑細(xì)桿上套有兩個(gè)質(zhì)量均為m的小球���,兩球之間用輕質(zhì)彈簧相連���,彈簧原長為L,用長為2L的細(xì)線連接兩球現(xiàn)將質(zhì)量為M的物塊用光滑的鉤子掛在細(xì)線上���,從細(xì)線繃直開始釋放���,物塊向下運(yùn)動(dòng)則物塊()A運(yùn)動(dòng)到最低點(diǎn)時(shí),小球的動(dòng)能為零B速度最大時(shí)���,彈簧的彈性勢能最大C速度最大時(shí)���,桿對(duì)兩球的支持力為(M2m)gD運(yùn)動(dòng)到最低點(diǎn)時(shí),桿對(duì)兩球的支持力小于(M2m)g解析:選AC物塊從開始釋放先做加速運(yùn)動(dòng)���,后做減速運(yùn)動(dòng)直到速度為零即到達(dá)最低點(diǎn)���,此時(shí)小球速度為零,兩球相距最近���,彈簧形變最大���,彈性勢能最大,故A正確���,B錯(cuò)誤���;速度最
10、大時(shí)���,即此時(shí)系統(tǒng)合力為零���,將兩小球和物塊看成系統(tǒng),受重力(M2m)g���,桿對(duì)兩球的支持力二力平衡���,故C正確;運(yùn)動(dòng)到最低點(diǎn)時(shí)���,物塊具有向上的加速度���,由類整體法可知���,桿對(duì)兩球的支持力大于(M2m)g,故D錯(cuò)誤8.如圖所示���,可視為質(zhì)點(diǎn)的小球A���、B用不可伸長的細(xì)軟輕線連接,跨過固定在地面上���、半徑為R的光滑圓柱���,A的質(zhì)量為B的二倍當(dāng)B位于地面時(shí),A恰與圓柱軸心等高將A由靜止釋放���,B上升的最大高度是()A2R B.C. D.解析:選C設(shè)A球剛落地時(shí)兩球速度大小為v���,根據(jù)機(jī)械能守恒定律2mgRmgR(2mm)v2得v2gR,B球繼續(xù)上升的高度h���,B球上升的最大高度為hRR.9.(2016年海南卷)如圖���,光滑圓
11���、軌道固定在豎直面內(nèi)���,一質(zhì)量為m的小球沿軌道做完整的圓周運(yùn)動(dòng)已知小球在最低點(diǎn)時(shí)對(duì)軌道的壓力大小為N1���,在高點(diǎn)時(shí)對(duì)軌道的壓力大小為N2.重力加速度大小為g,則N1N2的值為()A3mg B4mgC5mg D6mg解析:選D設(shè)小球在最低點(diǎn)時(shí)速度為v1���,在最高點(diǎn)時(shí)速度為v2���,根據(jù)牛頓第二定律有,在最低點(diǎn):N1mg���,在最高點(diǎn):N2mg���;從最高點(diǎn)到最低點(diǎn),根據(jù)機(jī)械能守恒定律有mv22mg2Rmv12���,聯(lián)立可得N1N26mg���,故選項(xiàng)D正確10.(2019屆云南模擬)如圖所示���,由半徑為R的光滑圓周和傾角為45的光滑斜面組成的軌道固定在豎直平面內(nèi),斜面和圓周之間由小圓弧平滑連接一小球恰能過最高點(diǎn)���,并始終貼著軌道
12���、內(nèi)側(cè)順時(shí)針轉(zhuǎn)動(dòng)則小球通過斜面的時(shí)間為(重力加速度為g)()A2 B2C(22) D()解析:選D小球恰好通過最高點(diǎn)的速度v1,由機(jī)械能守恒定律得mv12mgRmv22���,解得小球通過斜面頂端時(shí)的速度v2���,由運(yùn)動(dòng)學(xué)規(guī)律得Rv2tgt2sin45,則t()���,選項(xiàng)D正確二���、非選擇題11.(2018年江蘇卷)如圖所示,釘子A���、B相距5l���,處于同一高度細(xì)線的一端系有質(zhì)量為M的小物塊���,另一端繞過A固定于B.質(zhì)量為m的小球固定在細(xì)線上C點(diǎn),B���、C間的線長為3l.用手豎直向下拉住小球���,使小球和物塊都靜止���,此時(shí)BC與水平方向的夾角為53.松手后���,小球運(yùn)動(dòng)到與A、B相同高度時(shí)的速度恰好為零���,然后向下運(yùn)動(dòng)忽略一切摩擦
13���、,重力加速度為g���,取sin530.8���,cos530.6.求:(1)小球受到手的拉力大小F���;(2)物塊和小球的質(zhì)量之比Mm;(3)小球向下運(yùn)動(dòng)到最低點(diǎn)時(shí)���,物塊M所受的拉力大小T.解析:(1)設(shè)小球受AC���、BC的拉力分別為F1、F2.F1sin53F2cos53FmgF1cos53F2sin53且F1Mg解得FMgmg.(2)小球運(yùn)動(dòng)到與A���、B相同高度過程中小球上升高度h13lsin53���,物塊下降高度h22l根據(jù)機(jī)械能守恒定律mgh1Mgh2解得Mm65.(3)根據(jù)機(jī)械能守恒定律,小球回到起始點(diǎn)設(shè)此時(shí)AC方向的加速度大小為a���,物塊受到的拉力為T���,由牛頓第二定律得MgTMa,小球受AC的拉力TT由牛
14���、頓第二定律得Tmgcos53ma解得T.答案:(1)Mgmg(2)65(3)12如圖甲所示���,游樂場的過山車可以底朝上在圓軌道上運(yùn)行���,游客不會(huì)掉下來我們把這種情形抽象為如圖乙所示的模型:弧形軌道的下端與豎直圓軌道相接,使質(zhì)量為m的小球從弧形軌道上端滾下���,小球從圓軌道下端進(jìn)入后沿圓軌道運(yùn)動(dòng)如果已知圓軌道的半徑為R���,重力加速度為g,不考慮阻力(1)求若小球從高為h處由靜止釋放���,小球到達(dá)圓軌道底端時(shí)對(duì)軌道的壓力;(2)若要使小球運(yùn)動(dòng)過程中不脫離軌道���,討論小球由靜止釋放時(shí)的高度應(yīng)滿足的條件���;(3)若讓小球從高為h2R處的A點(diǎn)由靜止釋放,試求小球通過圓軌道底端后所能到達(dá)的最大高度解析:(1)小球從高為h處
15���、由靜止釋放到到達(dá)圓軌道底端的過程���,由機(jī)械能守恒定律得mghmv2在底端,由牛頓第二定律得Nmgm解得Nmgmmg根據(jù)牛頓第三定律得NNmg,方向?yàn)樨Q直向下(2)要使小球運(yùn)動(dòng)過程中不脫離軌道第一種可能:恰能到達(dá)最高點(diǎn)���,設(shè)在最高點(diǎn)時(shí)速度為vm���,有mgm能過最高點(diǎn),則在最高點(diǎn)時(shí)速度應(yīng)滿足vvm由機(jī)械能守恒定律有mghmv2mg2R解得hR.第二種可能:小球到達(dá)圓軌道上與圓心等高處時(shí)速度恰為零���,有mghmgR則hR不能到達(dá)圓軌道上高于圓心處���,則hR.所以hR或hR.(3)h2RR,設(shè)小球?qū)⒃贑點(diǎn)脫離軌道���,C點(diǎn)與軌道圓心的連線與水平方向成角���,此時(shí)N0即mgsinm小球從A點(diǎn)到C點(diǎn),根據(jù)機(jī)械能守恒定律有m
16���、g2RmvC2mg(RRsin)解得sin���,vC 小球從C處開始做斜拋運(yùn)動(dòng),到達(dá)最高點(diǎn)時(shí)速度vxvCsinvC小球從A點(diǎn)到最高點(diǎn)���,根據(jù)機(jī)械能守恒定律有mg2Rmghmvx2解得hR.答案:(1)mg���,豎直向下(2)hR或hR(3)R|學(xué)霸作業(yè)|自選一���、選擇題1.(2019屆石家莊一模)如圖所示,質(zhì)量為m的物體A和質(zhì)量為2m的物體B通過不可伸長的輕繩及輕質(zhì)彈簧連接在輕滑輪兩側(cè)開始用手托著物體A使彈簧處于原長且細(xì)繩伸直���,此時(shí)物體A與地面的距離為h���,物體B靜止在地面上現(xiàn)由靜止釋放A,A與地面即將接觸時(shí)速度恰好為0���,此時(shí)物體B對(duì)地面恰好無壓力���,重力加速度為g���,下列說法正確的是()A物體A下落過程中一直
17���、處于失重狀態(tài)B物體A即將落地時(shí),物體B處于失重狀態(tài)C物體A下落過程中���,彈簧的彈性勢能最大值為mghD物體A下落過程中���,A的動(dòng)能和彈簧的彈性勢能之和先增大后減小解析:選C根據(jù)題述“A與地面即將接觸時(shí)速度恰好為零”可知A先加速后減速向下運(yùn)動(dòng)���,加速度方向先向下后向上,物體A先處于失重狀態(tài)后處于超重狀態(tài)���,選項(xiàng)A錯(cuò)誤���;根據(jù)題述“A與地面即將接觸時(shí)速度恰好為零,此時(shí)物體B對(duì)地面恰好無壓力”���,可知此時(shí)細(xì)繩中拉力等于B的重力���,B處于靜止?fàn)顟B(tài),加速度為零���,B不是處于失重狀態(tài)���,選項(xiàng)B錯(cuò)誤;對(duì)A和彈簧組成的系統(tǒng)���,在A由靜止下落到A與地面即將接觸時(shí)的過程���,系統(tǒng)重力勢能���、動(dòng)能和彈性勢能相互轉(zhuǎn)化,取地面為重力勢能為零���,初
18���、狀態(tài)系統(tǒng)機(jī)械能等于mgh,末狀態(tài)系統(tǒng)機(jī)械能為彈性勢能���,由機(jī)械能守恒定律���,物體A下落過程中,彈簧的彈性勢能最大值為mgh���,選項(xiàng)C正確;物體A下落過程中���,A的重力勢能一直減小���,A的動(dòng)能和彈簧的彈性勢能之和一直增大���,選項(xiàng)D錯(cuò)誤2.(多選)(2018屆佛山模擬)如圖所示,一根長為L不可伸長的輕繩跨過光滑的水平軸O���,兩端分別連接質(zhì)量為2m的小球A和質(zhì)量為m的物塊B���,由圖示位置釋放后,當(dāng)小球轉(zhuǎn)動(dòng)到水平軸正下方時(shí)輕繩的中點(diǎn)正好在水平軸O點(diǎn)���,且此時(shí)物塊B的速度剛好為零���,則下列說法中正確的是()A物塊B一直處于靜止?fàn)顟B(tài)B小球A從圖示位置運(yùn)動(dòng)到水平軸正下方的過程中機(jī)械能守恒C小球A運(yùn)動(dòng)到水平軸正下方時(shí)的速度小于D
19、小球A從圖示位置運(yùn)動(dòng)到水平軸正下方的過程中���,小球A與物塊B組成的系統(tǒng)機(jī)械能守恒解析:選CD當(dāng)小球轉(zhuǎn)動(dòng)到水平軸正下方時(shí)輕繩的中點(diǎn)正好在水平軸O點(diǎn)���,所以小球A下降的高度為,繩的拉力大于B的重力���,物塊B會(huì)上升一定的高度h���,由機(jī)械能守恒得2mv22mgmgh���,所以小球A運(yùn)動(dòng)到水平軸正下方時(shí)的速度v,A錯(cuò)誤���,C正確���;在整個(gè)過程中小球A與物塊B組成的系統(tǒng)機(jī)械能守恒,B錯(cuò)誤���,D正確3.如圖所示���,在一個(gè)直立的光滑管內(nèi)放置一個(gè)輕質(zhì)彈簧,上端O點(diǎn)與管口A的距離為2x0���,一個(gè)質(zhì)量為m的小球從管口由靜止下落���,將彈簧壓縮至最低點(diǎn)B,壓縮量為x0���,不計(jì)空氣阻力���,則正確的是()A小球運(yùn)動(dòng)的最大速度等于2B彈簧的勁度系數(shù)為C
20、小球運(yùn)動(dòng)中最大加速度為gD彈簧的最大彈性勢能為3mgx0解析:選D小球從A點(diǎn)到O點(diǎn)做自由落體運(yùn)動(dòng)���,到達(dá)O點(diǎn)的速度為v22g2x0���,解得v2,接觸彈簧后���,合力減小���,加速度減小,到合力減小到零時(shí)���,速度達(dá)到最大值���,所以最大速度大于2,A錯(cuò)誤���;小球速度達(dá)到最大時(shí)���,mgFkx���,解得x0,可見桿對(duì)小球A做正功���,選項(xiàng)A正確���,B錯(cuò)誤;由于系統(tǒng)機(jī)械能守恒���,故小球A增加的機(jī)械能等于小球B減小的機(jī)械能���,桿對(duì)小球B做負(fù)功,選項(xiàng)C錯(cuò)誤5.(多選)如圖所示���,輕彈簧一端固定在O1點(diǎn)���,另一端系一小球,小球穿在固定于豎直面內(nèi)���、圓心為O2的光滑圓環(huán)上���,O1在O2的正上方���,C是O1O2的連線和圓環(huán)的交點(diǎn),將小球從圓環(huán)上的A點(diǎn)無初速
21���、度釋放后,發(fā)現(xiàn)小球通過了C點(diǎn)���,最終在A���、B之間做往復(fù)運(yùn)動(dòng)已知小球在A點(diǎn)時(shí)彈簧被拉長,在C點(diǎn)時(shí)彈簧被壓縮���,則下列判斷正確的是()A彈簧在A點(diǎn)的伸長量一定大于彈簧在C點(diǎn)的壓縮量B小球從A至C一直做加速運(yùn)動(dòng)���,從C至B一直做減速運(yùn)動(dòng)C彈簧處于原長時(shí),小球的速度最大D小球機(jī)械能最大的位置有兩處解析:選AD因只有重力和彈簧彈力做功���,故小球和彈簧組成的系統(tǒng)機(jī)械能守恒���,小球在A點(diǎn)的動(dòng)能和重力勢能之和最小���,所以在A點(diǎn)彈簧的彈性勢能大于彈簧在C點(diǎn)的彈性勢能,A正確���;小球從A點(diǎn)至C點(diǎn)���,切線方向先加速后減速,當(dāng)切線方向加速度為零時(shí)���,速度最大���,此時(shí)彈簧處于伸長狀態(tài),B���、C錯(cuò)誤���;當(dāng)彈簧處于原長狀態(tài)時(shí),其彈性勢能為零���,小球
22���、的機(jī)械能最大���,由對(duì)稱性可知,在A���、C間和C���、B間應(yīng)各有一處,D正確6如圖所示���,質(zhì)量、初速度大小都相同的A���、B���、C三個(gè)小球,在同一水平面上���,A球豎直上拋���,B球以傾斜角斜向上拋,空氣阻力不計(jì)���,C球沿傾角為的光滑斜面上滑���,它們上升的最大高度分別為hA���、hB、hC���,則()AhAhBhC BhAhBhC DhAhChB解析:選DA球和C球上升到最高點(diǎn)時(shí)速度均為零���,而B球上升到最高點(diǎn)時(shí)仍有水平方向的速度,即仍有動(dòng)能對(duì)A���、C球列機(jī)械能守恒定律方程為mghmv02���,解得h,對(duì)B球:mghmvt2mv02���,且vt0所以hh���,故D正確7.(多選)如圖所示,在固定的光滑水平桿上���,質(zhì)量為m的物體P用輕繩跨過光滑的滑輪
23���、O���、O連接質(zhì)量為2m的物體Q,用手托住Q使整個(gè)系統(tǒng)靜止���,此時(shí)輕繩剛好拉直���,且AOL,OBh���,AB3.125 m1的情況下,小滑塊落在小車上的位置與小車左端的最小距離xmin.解析:(1)小滑塊滑上小車后將做勻減速直線運(yùn)動(dòng)���,小車將做勻加速直線運(yùn)動(dòng)���,設(shè)小滑塊加速度大小為a1,小車加速度為a2���,由牛頓第二定律可得對(duì)小滑塊有mgma1對(duì)小車有mgMa2設(shè)小車與小滑塊經(jīng)歷時(shí)間t后速度相等���,則有v0a1ta2t小滑塊的位移s1v0ta1t2小車的位移s2a2t2代入數(shù)據(jù)解得s15 m���,s22 m由于s2s,Ls1s2���,說明小車與墻壁碰撞時(shí)小滑塊恰好與小車共速并到達(dá)小車右端���,即小滑塊到達(dá)P點(diǎn)的速度v14 m
24、/s.(2)設(shè)小滑塊到達(dá)N點(diǎn)時(shí)的速度為vN���,則有Fm從P點(diǎn)到N點(diǎn)過程中���,由機(jī)械能守恒定律有mv12mvN2mgR由式得Fm2mg故b2mg40 N由式,結(jié)合圖乙可知���,圖象的斜率kmv1232解得a1.25 m1.(3)設(shè)小滑塊恰能經(jīng)過半圓軌道最高點(diǎn)Q時(shí)的軌道半徑為R���,此時(shí)經(jīng)過Q點(diǎn)的速度為vQ則有mgm從P到Q點(diǎn)過程中,由機(jī)械能守恒可得mv12mvQ22mgR解得R0.32 m���,即3.125 m1可見3.125 m1在的情況下���,小滑塊在半圓軌道運(yùn)動(dòng)過程中始終不會(huì)脫離軌道由式可知vQ小滑塊離開Q點(diǎn)后做平拋運(yùn)動(dòng)至到達(dá)小車的過程中���,有xvQt,2Rgt2解得x,當(dāng)R0.2 m時(shí)���,x有最大值xm0.8 m小滑塊落在小車上的位置與小車左端的最小距離xminLxm2.2 m.答案:(1)4 m/s(2)1.2540(3)2.2 m16
 2020高考物理一輪總復(fù)習(xí) 第五章 機(jī)械能 能力課2 機(jī)械能守恒定律練習(xí)(含解析)新人教版
2020高考物理一輪總復(fù)習(xí) 第五章 機(jī)械能 能力課2 機(jī)械能守恒定律練習(xí)(含解析)新人教版