《四連桿越障巡檢機(jī)器人設(shè)計(jì)分析》由會(huì)員分享���,可在線閱讀�,更多相關(guān)《四連桿越障巡檢機(jī)器人設(shè)計(jì)分析(3頁(yè)珍藏版)》請(qǐng)?jiān)谘b配圖網(wǎng)上搜索���。
1���、四連桿越障巡檢機(jī)器人設(shè)計(jì)分析
【摘要】根據(jù)高壓輸電線路障礙環(huán)境特點(diǎn)及巡檢任務(wù)需求,提出一種基于平行四邊形的四連桿越障巡檢機(jī)器人����。行走越障機(jī)構(gòu)采用一個(gè)行走電機(jī)驅(qū)動(dòng)行走輪實(shí)現(xiàn)線上行走,提供機(jī)器人的行走驅(qū)動(dòng)力,采用一個(gè)夾緊電機(jī)驅(qū)動(dòng)夾緊輪�,保證夾緊輪與行走輪剛好夾緊輸電線,防止機(jī)器人從線上跌落���;利用連桿與行走臂構(gòu)成四連桿結(jié)構(gòu)實(shí)現(xiàn)機(jī)器人的越障功能�。利用ADMAS建立巡檢機(jī)器人虛擬樣機(jī)����,研究水平行走和爬坡時(shí)機(jī)器人的驅(qū)動(dòng)特性,仿真結(jié)果為機(jī)器人電機(jī)選型����、載荷特性分析和控制策略制定奠定基礎(chǔ)。
【關(guān)鍵詞】巡檢機(jī)器人����;四連桿結(jié)構(gòu);越障分析���;虛擬仿真
1引言
高壓輸電線路
2�����、長(zhǎng)期暴露在外部環(huán)境中會(huì)導(dǎo)致線路老化磨損�����、斷股等損傷�,存在很大的安全隱患���,電力部門需定期對(duì)輸電線路進(jìn)行巡檢�。目前采用的方法主要有人工巡檢和直升機(jī)巡檢�,人力巡檢效率低、危險(xiǎn)性高��,且部分特殊環(huán)境無(wú)法巡檢�;直升機(jī)巡檢成本高[1]。國(guó)內(nèi)外多家研究機(jī)構(gòu)對(duì)輸電線巡檢機(jī)器人展開(kāi)了研究���,如日本東京工業(yè)大學(xué)研制的遙操作巡檢機(jī)器人Ex-pliner[2]通過(guò)機(jī)械臂調(diào)整機(jī)器人質(zhì)心位置實(shí)現(xiàn)越障���,加拿大魁北克水電研究所開(kāi)發(fā)的帶電巡檢機(jī)器人LineScout[3]采用蠕動(dòng)方式交替跨越障礙物;國(guó)內(nèi)武漢大學(xué)的吳功平教授團(tuán)隊(duì)[4]和中國(guó)科學(xué)院沈陽(yáng)自動(dòng)化研究所王洪光團(tuán)隊(duì)[5-6]也對(duì)高壓輸電線巡檢機(jī)器人進(jìn)行了研究��。但是大多數(shù)巡檢機(jī)
3��、器人因其結(jié)構(gòu)復(fù)雜�、體型大��、控制難度高且整機(jī)越障時(shí)間長(zhǎng)等諸多因數(shù)��,限制了巡檢機(jī)器人的實(shí)際應(yīng)用����。本文設(shè)計(jì)了一種基于四連桿越障的輸電線巡檢機(jī)器人����,利用平行四桿結(jié)構(gòu)的變形適應(yīng)性,將越障過(guò)程中的阻力轉(zhuǎn)化為行走輪抬高的動(dòng)力�,實(shí)現(xiàn)巡檢機(jī)器人跨越防震錘、間隔棒等越障物�����,越障流程簡(jiǎn)單易于控制��,行走安全平穩(wěn)�。并對(duì)機(jī)器人的線上行走、爬坡��、越障等運(yùn)動(dòng)功能進(jìn)行分析����,驗(yàn)證了機(jī)器人用于線上巡檢的可行性��。
2巡檢機(jī)器人結(jié)構(gòu)
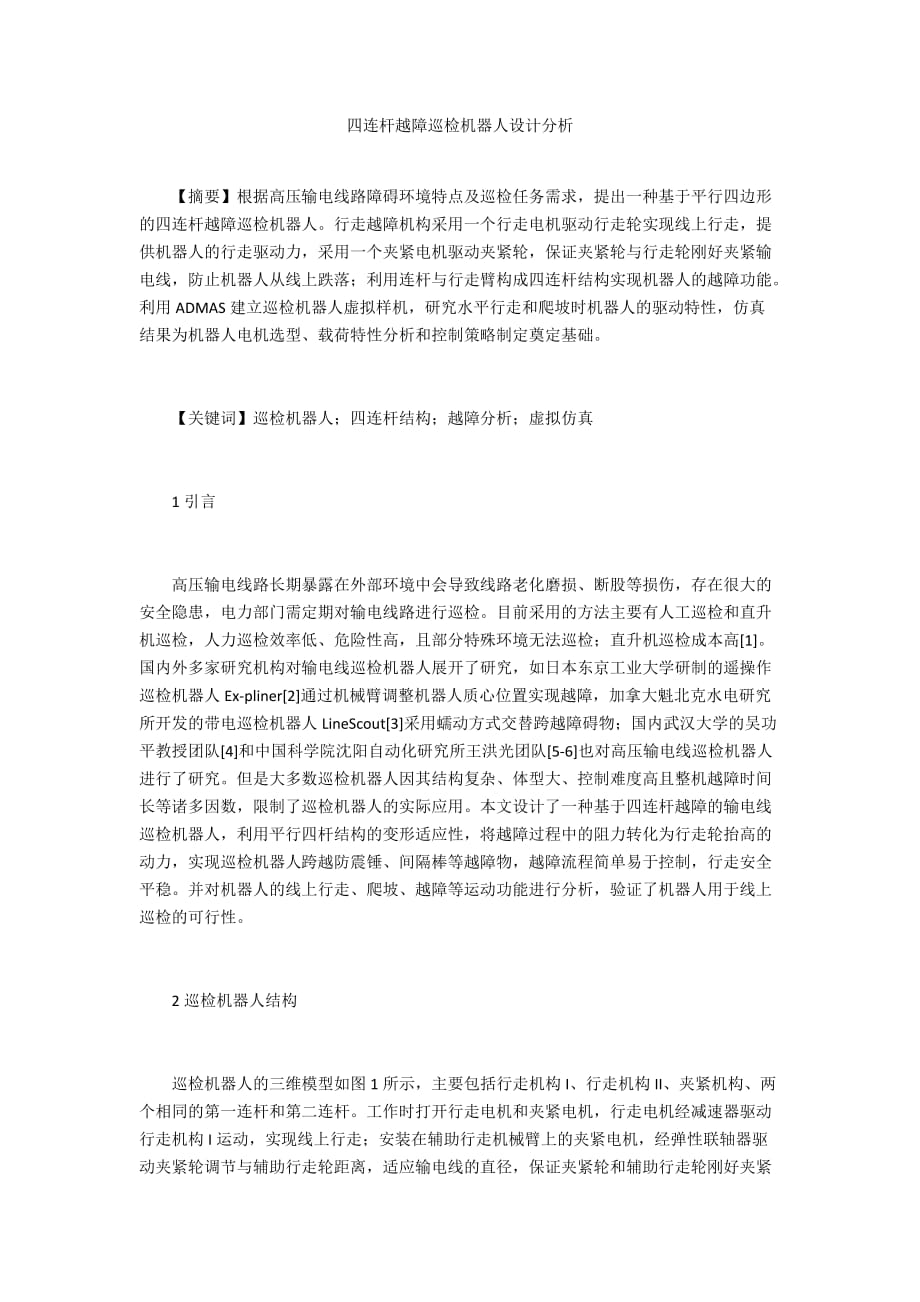
巡檢機(jī)器人的三維模型如圖1所示���,主要包括行走機(jī)構(gòu)I、行走機(jī)構(gòu)II�、夾緊機(jī)構(gòu)、兩個(gè)相同的第一連桿和第二連桿���。工作時(shí)打開(kāi)行走電機(jī)和夾緊電機(jī),行走電機(jī)經(jīng)減速器驅(qū)動(dòng)行走機(jī)構(gòu)I運(yùn)動(dòng)��,實(shí)現(xiàn)線上
4���、行走���;安裝在輔助行走機(jī)械臂上的夾緊電機(jī),經(jīng)彈性聯(lián)軸器驅(qū)動(dòng)夾緊輪調(diào)節(jié)與輔助行走輪距離��,適應(yīng)輸電線的直徑��,保證夾緊輪和輔助行走輪剛好夾緊輸電線�,防止巡檢機(jī)器人從線上掉落。巡檢機(jī)器人可以用單臂或雙臂懸掛控制箱在輸電線上平穩(wěn)行走完成線上巡檢作業(yè)任務(wù)�����。利用巡檢機(jī)器人執(zhí)行巡檢任務(wù)時(shí),將機(jī)器人的行走輪懸掛在輸電線上��,夾緊輪與行走輪配合夾緊輸電線��,機(jī)器人在行走電機(jī)的驅(qū)動(dòng)下在線上行走�,控制夾緊電機(jī)的夾緊力可調(diào)節(jié)行走輪與輸電線間的摩擦力,從而保證機(jī)器人在線上平穩(wěn)行走����。兩個(gè)行走機(jī)械臂與第一連桿和第二連桿構(gòu)成平行四桿機(jī)構(gòu),利用平行四邊形的變形適應(yīng)性�,可以確保行走機(jī)構(gòu)能夠輕松跨越震動(dòng)錘、間隔棒等障礙物����。
3
5、巡檢機(jī)器人分析
3.1水平行走分析
將巡檢機(jī)器人三維模型另存為.x_t格式文件�����,直接導(dǎo)入到ADAMS虛擬環(huán)境中形成初步的虛擬樣機(jī)模型���,為模型添加運(yùn)動(dòng)副約束以及運(yùn)動(dòng)參數(shù)���,構(gòu)成完整的虛擬樣機(jī)模型�。為行走輪添加轉(zhuǎn)動(dòng)速度為360°/s���,設(shè)置仿真時(shí)間為5s����,仿真步長(zhǎng)為0.01s�。
3.2爬坡分析
正常工作過(guò)程中,巡檢機(jī)器人需要具有一定的爬坡能力����,以上坡行進(jìn)為例��。圖中AB為高壓輸電線路��,其與水平面所形成的角度記為∂��,巡檢機(jī)器人正常工作時(shí)兩條機(jī)械臂始終保持豎直狀態(tài)掛線��,圖中平行四邊形機(jī)構(gòu)CDEF在巡檢機(jī)器人行進(jìn)過(guò)程中��,CD���,EF邊始終與輸電線
6���、路保持平行�,故EF邊與水平面所形成的角度為∂�。以C,D��,E�����,F(xiàn)四點(diǎn)為連接點(diǎn)所形成的平行四連桿機(jī)構(gòu)對(duì)角線ED與水平面所形成最大角度時(shí)巡檢機(jī)器人的爬坡能力最強(qiáng)�。仿真結(jié)束后測(cè)量?jī)尚凶咻嗱?qū)動(dòng)力矩如圖7所示。從圖中可以看出5s時(shí)刻��,行走機(jī)構(gòu)I開(kāi)始爬坡����,此時(shí)行走輪的驅(qū)動(dòng)力矩也隨著增大,在9s左右行走機(jī)構(gòu)II開(kāi)始爬坡���,存在與行走機(jī)構(gòu)I相同的現(xiàn)象�����,此時(shí)需要的驅(qū)動(dòng)力矩也增大���。當(dāng)行走機(jī)構(gòu)完全與帶有傾斜角度的輸電線接觸時(shí)�����,需求的力矩也要比水平行走時(shí)大將近4倍�����。
4結(jié)論
本文設(shè)計(jì)了一種基于平行四連桿越障機(jī)構(gòu)的巡檢機(jī)器人���,并通過(guò)ADAMS建立巡檢機(jī)器人的虛擬樣機(jī)模型,對(duì)機(jī)器人水平行走和爬坡運(yùn)動(dòng)進(jìn)行了動(dòng)力學(xué)仿真分析���,仿真分析將為實(shí)際的控制和載荷能力分析提供參考。
 四連桿越障巡檢機(jī)器人設(shè)計(jì)分析
四連桿越障巡檢機(jī)器人設(shè)計(jì)分析