《臺式電風(fēng)扇的搖頭機(jī)構(gòu)機(jī)械原理說明書》由會員分享����,可在線閱讀���,更多相關(guān)《臺式電風(fēng)扇的搖頭機(jī)構(gòu)機(jī)械原理說明書(6頁珍藏版)》請在裝配圖網(wǎng)上搜索�。
1�����、1. 設(shè)計題目
設(shè)計臺式電風(fēng)扇的搖頭機(jī)構(gòu),使電風(fēng)扇作搖頭動作(在一定的仰角下隨搖桿 擺動)�����。風(fēng)扇的直徑為300mm電扇電動機(jī)轉(zhuǎn)速n= 1450r/min���,電扇搖頭周期 t=10s����,電扇擺動角度書二95°�����、俯仰角度?二20°與急回系數(shù)K=�。風(fēng)扇可以 在一定周期下進(jìn)行擺頭運(yùn)動����,使送風(fēng)面積增大。
2. 設(shè)計要求
⑴.電風(fēng)扇搖頭機(jī)構(gòu)至少包括連桿機(jī)構(gòu)���、蝸輪蝸桿機(jī)構(gòu)和齒輪傳動機(jī)構(gòu)三種機(jī)構(gòu)�����。
⑵.畫出機(jī)器的運(yùn)動方案簡圖與運(yùn)動循環(huán)圖����。擬訂運(yùn)動循環(huán)圖時,執(zhí)行構(gòu)件的動 作起止位置可根據(jù)具體情況重疊安排���, 但必須滿足工藝上各個動作的配合��, 在時 間和空間上不能出現(xiàn)干涉����。
⑶.設(shè)計連桿機(jī)構(gòu)����,自行確定運(yùn)動規(guī)律
2、��,選擇連桿機(jī)構(gòu)類型����,校核最大壓力角。
⑷.設(shè)計計算齒輪機(jī)構(gòu)����,確定傳動比���,選擇適當(dāng)?shù)拿?shù)。
⑸.編寫設(shè)計計算說明書����。
⑹.學(xué)生可進(jìn)一步完成機(jī)器的計算機(jī)演示驗證和凸輪的數(shù)控加工等。
竝右虔頭機(jī)卅
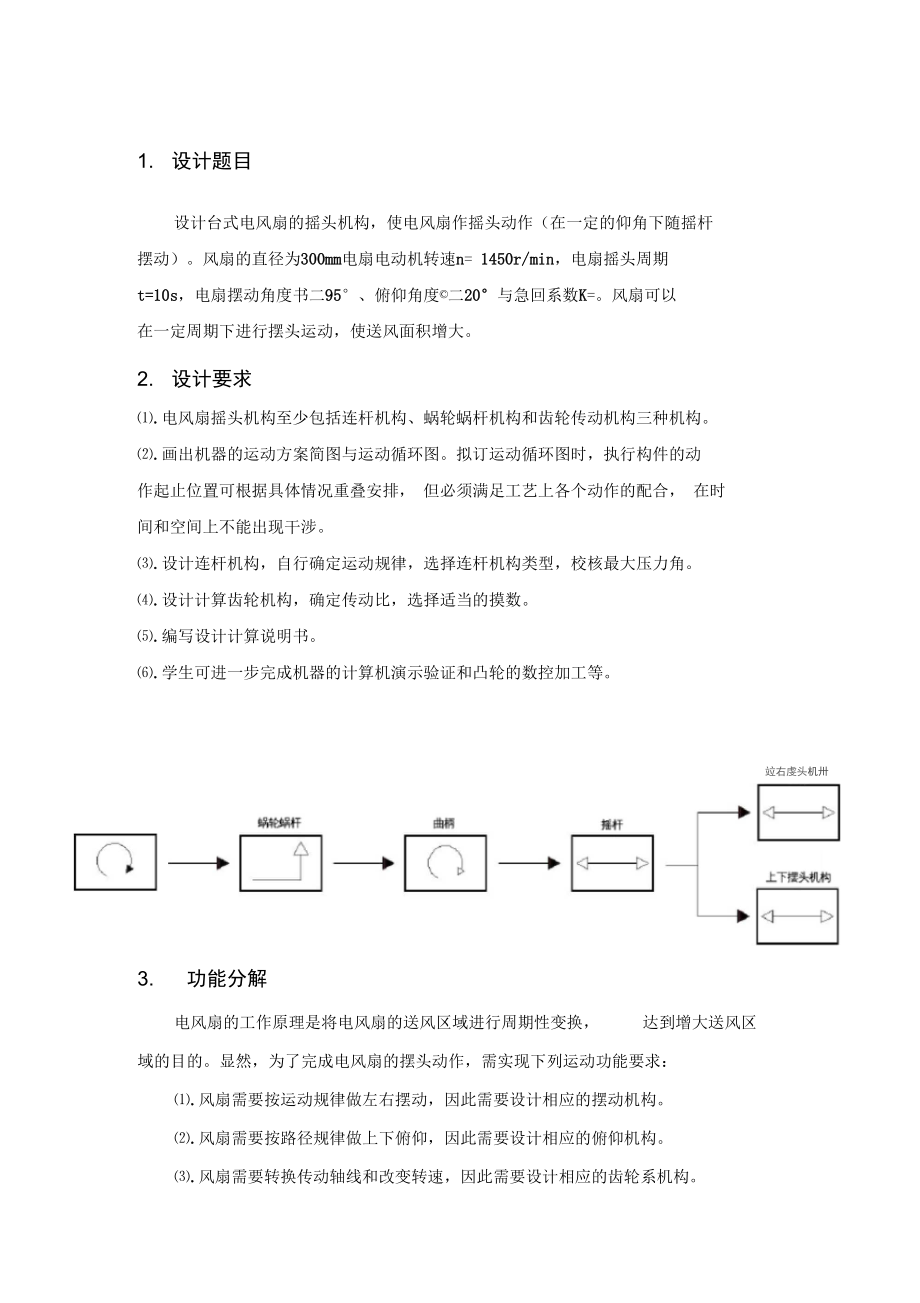
3. 功能分解
電風(fēng)扇的工作原理是將電風(fēng)扇的送風(fēng)區(qū)域進(jìn)行周期性變換����, 達(dá)到增大送風(fēng)區(qū)
域的目的。顯然�,為了完成電風(fēng)扇的擺頭動作,需實現(xiàn)下列運(yùn)動功能要求:
⑴.風(fēng)扇需要按運(yùn)動規(guī)律做左右擺動�,因此需要設(shè)計相應(yīng)的擺動機(jī)構(gòu)�����。
⑵.風(fēng)扇需要按路徑規(guī)律做上下俯仰����,因此需要設(shè)計相應(yīng)的俯仰機(jī)構(gòu)。
⑶.風(fēng)扇需要轉(zhuǎn)換傳動軸線和
3�、改變轉(zhuǎn)速,因此需要設(shè)計相應(yīng)的齒輪系機(jī)構(gòu)���。
對這兩個機(jī)構(gòu)的運(yùn)動功能作進(jìn)一步分析�����,可知它們分別應(yīng)該實現(xiàn)下列基本運(yùn) 動:
⑴.左右擺動有三個基本運(yùn)動:運(yùn)動軸線變換��、傳動比降低和周期性擺動�。
⑵.俯仰運(yùn)動有兩個基本運(yùn)動:運(yùn)動方向變換和周期性俯仰。
⑶.轉(zhuǎn)換運(yùn)動軸線和改變傳動比有一個基本動作:運(yùn)動軸線變換����。
此外,還要滿足傳動性能要求:
改變電風(fēng)扇的送風(fēng)區(qū)域時�����,在急回系數(shù) K=��、擺動角度屮=95°的要求下�, 盡量保持運(yùn)動的平穩(wěn)轉(zhuǎn)換和減小機(jī)構(gòu)間的摩擦。
圖運(yùn)動功能圖
圖運(yùn)動循環(huán)圖
4. 機(jī)構(gòu)選用
根據(jù)前述要求�����,電風(fēng)扇的應(yīng)作繞一點(diǎn)的往復(fù)擺動,且在工作周期中有急回特 性����。驅(qū)動方式為電機(jī)驅(qū)動
4、���,利用《機(jī)械原理課程設(shè)計指導(dǎo)書》中第 16頁中的設(shè) 計目錄�����,分別選擇相應(yīng)的機(jī)構(gòu)����,以實現(xiàn)這三個機(jī)構(gòu)的各項功能��,見表一�����。
表一 ��?��?電風(fēng)扇擺頭的機(jī)構(gòu)選形
0功能
執(zhí)行機(jī)構(gòu)
工藝動作
執(zhí)行機(jī)構(gòu)
設(shè)計矩陣
左右擺動
連桿機(jī)構(gòu)
急進(jìn)急回往復(fù)運(yùn)動
齒輪機(jī)構(gòu)
連桿機(jī)構(gòu)
A
上下擺動
連桿機(jī)構(gòu)
扇形往復(fù)運(yùn)動
連桿機(jī)構(gòu)
A
電風(fēng)扇左右擺頭機(jī)構(gòu)
考慮到用電動機(jī)驅(qū)動���、而且空間比較狹小����,又需要的三個基本動作和高傳動 比要求。轉(zhuǎn)換運(yùn)動軸線與改變傳動比機(jī)構(gòu)(蝸輪蝸桿與行星輪系組合而成的齒輪 箱歸32和&24���。優(yōu)點(diǎn)是在較小空間內(nèi)可以運(yùn)動軸線變換���,且有自鎖功能。為了能 實現(xiàn)上下�、左右
5、往復(fù)運(yùn)動�����,在經(jīng)濟(jì)簡單的原則下選擇雙搖桿機(jī)構(gòu)( a43),實現(xiàn)運(yùn)
動方向交替交換��。綜上�,整個電風(fēng)扇左右擺頭機(jī)構(gòu) Ai={ a24, a32, a43}0
電風(fēng)扇上下仰俯機(jī)構(gòu)
考慮到能實行仰俯運(yùn)動,事先計劃使用(凸輪機(jī)構(gòu)) a11 設(shè)計仰俯機(jī)構(gòu)���,但 由于電扇的機(jī)殼大小有限�, 并且凸輪只常使用在低負(fù)載的傳動過程����, 假如當(dāng)電風(fēng) 扇的機(jī)頭被某重物壓住,則很容易損壞凸輪��。所以�,改變成方案二使用 A={ a33} (連桿滑塊機(jī)構(gòu)) 設(shè)計���。將機(jī)殼引出桿使用一條路徑導(dǎo)軌進(jìn)行約束, 來完成設(shè)想 的仰俯運(yùn)動�����。
5.運(yùn)動方案及選擇
左右擺動方案一(放棄):
圖 左右擺頭方案一機(jī)構(gòu)簡圖
圖 左右擺頭方案一
6、機(jī)構(gòu)立體視圖
該方案主動件有兩個���, 一個單獨(dú)帶動風(fēng)扇扇片轉(zhuǎn)動����, 另幾個則為上圖帶箭頭的圓 盤做整周回轉(zhuǎn)帶動機(jī)頭左右擺動�����。
機(jī)構(gòu)分解: 總體傳動——四桿機(jī)構(gòu)(曲柄搖桿機(jī)構(gòu)) 曲柄:圖中圓盤轉(zhuǎn)動中心到上表面連結(jié)處 搖桿:機(jī)頭所在直線 搖桿:連接機(jī)頭和轉(zhuǎn)盤
優(yōu)點(diǎn): 機(jī)構(gòu)簡單���,主動件為連架桿便于計算四桿機(jī)構(gòu)參數(shù)
缺點(diǎn): 需要兩個主動力即需要兩個電機(jī)驅(qū)動
左右擺動方案二(放棄):
圖 5.2.1 左右擺動方案二機(jī)構(gòu)簡圖
圖 5.2.2 左右擺動方案二立體圖 該設(shè)計方案采用了齒輪箱改變輸入輸出速度�����、渦輪蝸桿用于減速并轉(zhuǎn)換速度方 向��、四桿機(jī)構(gòu)來進(jìn)行機(jī)頭的左右擺動并達(dá)到急回效果����。
機(jī)構(gòu)分解:
7�、
減 速——齒輪箱及其蝸輪蝸桿機(jī)構(gòu) 左右擺頭——四桿機(jī)構(gòu) 優(yōu)點(diǎn):只需要一個主動件即一個電機(jī)即可得到風(fēng)扇轉(zhuǎn)動和機(jī)頭擺動兩種運(yùn)動�。 缺點(diǎn):在達(dá)到機(jī)頭左右擺動效果的同時��, 馬達(dá)齒輪箱也會自轉(zhuǎn)���, 達(dá)不到預(yù)期的效 果�����。
左右擺動方案三(采用):
圖 5.3.1 左右擺動方案三機(jī)構(gòu)簡圖
圖 5.3.2 左右擺動方案三立體圖 該方案在方案 2 的基礎(chǔ)上�,改變了四桿機(jī)構(gòu)的機(jī)架及各桿的位置����, 消除了其自轉(zhuǎn), 達(dá)到扇葉隨搖桿左右擺動的效果����。
優(yōu)點(diǎn):蝸輪與下面的轉(zhuǎn)盤同軸但可以拉伸, 在需要電扇轉(zhuǎn)頭時放下蝸輪使其與蝸 桿嚙合���,使蝸桿帶動蝸輪轉(zhuǎn)動,帶動轉(zhuǎn)頭;當(dāng)不需要轉(zhuǎn)頭時���,拔起蝸輪即 可脫離嚙合。
上下?lián)u擺方
8�、案
圖 5.4.1 上下擺動方案立體圖
該方案中, 導(dǎo)軌來控制風(fēng)扇機(jī)頭的上下?lián)u擺�����, 導(dǎo)軌的形狀可以根據(jù)要求更改來達(dá) 到不同的上下?lián)u擺效果�,并為了美觀將導(dǎo)軌藏于機(jī)殼內(nèi)部���。
導(dǎo)軌套在主軸上, 不隨著機(jī)頭左右轉(zhuǎn)動�, 而機(jī)頭在左右轉(zhuǎn)動時其內(nèi)部的凸起物受 導(dǎo)軌軌跡的約束,帶動機(jī)頭在左右轉(zhuǎn)動的同時隨導(dǎo)軌軌跡上下?lián)u擺��。
優(yōu)點(diǎn): 不涉及復(fù)雜機(jī)構(gòu)��,提高了可靠性����;上下?lián)u擺軌跡可以隨要求改變�。
比較優(yōu)缺點(diǎn)即選擇
左右擺動方案一: 優(yōu)點(diǎn):機(jī)構(gòu)簡單���,主動件為連架桿便于計算四桿機(jī)構(gòu)參數(shù) 缺點(diǎn):需要兩個主動力即需要兩個電機(jī)驅(qū)動
左右擺動方案二: 優(yōu)點(diǎn):只需要一個主動件即一個電機(jī)即可得到風(fēng)扇轉(zhuǎn)動和機(jī)頭擺動兩種運(yùn)
9��、動。 缺點(diǎn):在達(dá)到機(jī)頭左右擺動效果的同時, 馬達(dá)齒輪箱也會自轉(zhuǎn)����, 達(dá)不到預(yù)期的效 果���。
左右擺動方案三:
優(yōu)點(diǎn):蝸輪與下面的轉(zhuǎn)盤同軸但可以拉伸��, 在需要電扇轉(zhuǎn)頭時放下蝸輪使其與蝸 桿嚙合���,使蝸桿帶動蝸輪轉(zhuǎn)動����,帶動轉(zhuǎn)頭�;當(dāng)不需要轉(zhuǎn)頭時,拔起蝸輪即 可脫離嚙合����。
上下擺動方案:
此方案機(jī)構(gòu)簡單, 運(yùn)動的是外力并非運(yùn)動機(jī)構(gòu)��, 所以可靠性比較高��, 也不易導(dǎo)致 質(zhì)量問題��。
最終方案: 左右擺動方案三 與 上下擺動的結(jié)合��。
圖 5.6.1 最終方案三視圖
四桿長度的定義:
首先定義一個搖桿的長度�����,再由擺角及行程比系數(shù)K來估算出曲柄的長度,同時
可以由lmax lmin丨1 且最短桿為連架
10���、桿來輔助估算����,再由圖 562得到連
桿和機(jī)架的長度以及最小傳動角����。
表 5.6.2
序號
搖桿長c
擺角W
曲柄長a
行程比系數(shù)K
機(jī)架長d
連桿長b
最小傳動角a
1
95
2
95
3
95
4
95
5
95
6
95
7
95
8
95
9
95
10
95
圖563
觀察表5.6.
11、2��,根據(jù)實際情況(30CM直徑的扇葉)����,挑出比例最協(xié)調(diào)及最小傳動
角相對大的第二組數(shù)據(jù)�,并按比例縮放到 c=2.72cm、a=3cm d=6.56cm���、b=
6. 傳動比設(shè)計
由于在設(shè)計的左右擺頭機(jī)構(gòu)中�����,將蝸輪帶動連桿進(jìn)行整周回轉(zhuǎn)的勻速圓周
運(yùn)動����。當(dāng)蝸輪旋轉(zhuǎn)一周,電扇機(jī)殼也正好搖擺一回�����,得出蝸輪的轉(zhuǎn)速為 w=2X孔
/10= ji /5����。由于已知條件電動機(jī)轉(zhuǎn)速與蝸輪轉(zhuǎn)速相差較大, 并且需要改變軸向傳
動���,因此在設(shè)計中運(yùn)用了能產(chǎn)生較大傳動比的蝸輪蝸桿機(jī)構(gòu)與行星齒輪機(jī)構(gòu)�����。 最
終得出理想的傳動比�。
行星輪系設(shè)計
行星輪系在一定齒數(shù)比的情況下能產(chǎn)生較大的傳動比��。 設(shè)計中��,采用一對外
12�����、
嚙合和一對內(nèi)嚙合齒輪構(gòu)成。其中 Z3為內(nèi)嚙合齒輪����,乙=18,m=1 �;乙=33,2=1�,
25
Z2'=17, m2'=1; Z3=68�����, z=1��。計算得傳動比為 �。
3
圖行星輪系
蝸輪蝸桿輪系設(shè)計
與行星輪系配合���,并考慮電扇機(jī)殼的體積大小����,蝸輪蝸桿的尺寸不宜過大����。
設(shè)計中蝸桿的直徑為18��,m=1,a =20 , 丫 =59 02 10.48 ;蝸輪的Z=29, m=1,a
=20 , B =59 02 10.48�����,如此���,蝸輪蝸桿輪系的傳動比i=29,且均為左旋�。、
將兩種輪系組合成一個復(fù)合輪系��,能順利地符合設(shè)計要求���,不僅傳動的軸向 改變����,而且���,完成了較大傳動比的減速過
13�����、程���,綜合兩者的傳動比����,得 i總=725 0
3
7. 機(jī)構(gòu)參數(shù)計算
雙搖桿機(jī)構(gòu)設(shè)計
因為使用的是以連桿做主動件的雙搖桿機(jī)構(gòu)���, 區(qū)別于日常的設(shè)計方法����,所以,
此次設(shè)計我們采用一種新的設(shè)計思路一一機(jī)架轉(zhuǎn)換法����。
機(jī)架轉(zhuǎn)換法的理論依據(jù)如圖所示,圖一中的 V1是絕對速度��,V2是機(jī)構(gòu)運(yùn)動 后���,機(jī)架相對于搖桿的相對速度,此時 V仁V2然后轉(zhuǎn)換機(jī)架��,將機(jī)架轉(zhuǎn)換至圖 一中的搖桿位置�����,現(xiàn)在同一位置處,設(shè)定圖二中的 V仁V2這樣按照圖2的機(jī)構(gòu) 設(shè)計尺寸�����,所得的尺寸就是實際問題所需要的尺寸長度��。
此設(shè)計思路����,克服了連桿機(jī)構(gòu)以連桿為主動件,連架桿為為從動所產(chǎn)生的難 題����,通過轉(zhuǎn)換思路,等效運(yùn)動規(guī)律���,設(shè)計出理想的尺寸長度�����。
搖桿周期角速度圖:
8 設(shè)計圖紙
(1) 方案設(shè)計簡圖
(2) 四桿運(yùn)動規(guī)律表
9.參考文獻(xiàn)
(1) 裘建新?機(jī)械原理課程設(shè)計指導(dǎo)書?北京高等教育出版社2005
(2) 申永勝.機(jī)械原理教程(第2版).北京清華大學(xué)出版社2005
 臺式電風(fēng)扇的搖頭機(jī)構(gòu)機(jī)械原理說明書
臺式電風(fēng)扇的搖頭機(jī)構(gòu)機(jī)械原理說明書