《裝載機(jī)液壓系統(tǒng)設(shè)計(jì)》由會(huì)員分享�,可在線閱讀,更多相關(guān)《裝載機(jī)液壓系統(tǒng)設(shè)計(jì)(11頁珍藏版)》請?jiān)谘b配圖網(wǎng)上搜索�。
1、6.0000圖文
2.1原系統(tǒng)工作原理及節(jié)流損失分析
裝載機(jī)工作裝置動(dòng)臂部分概述
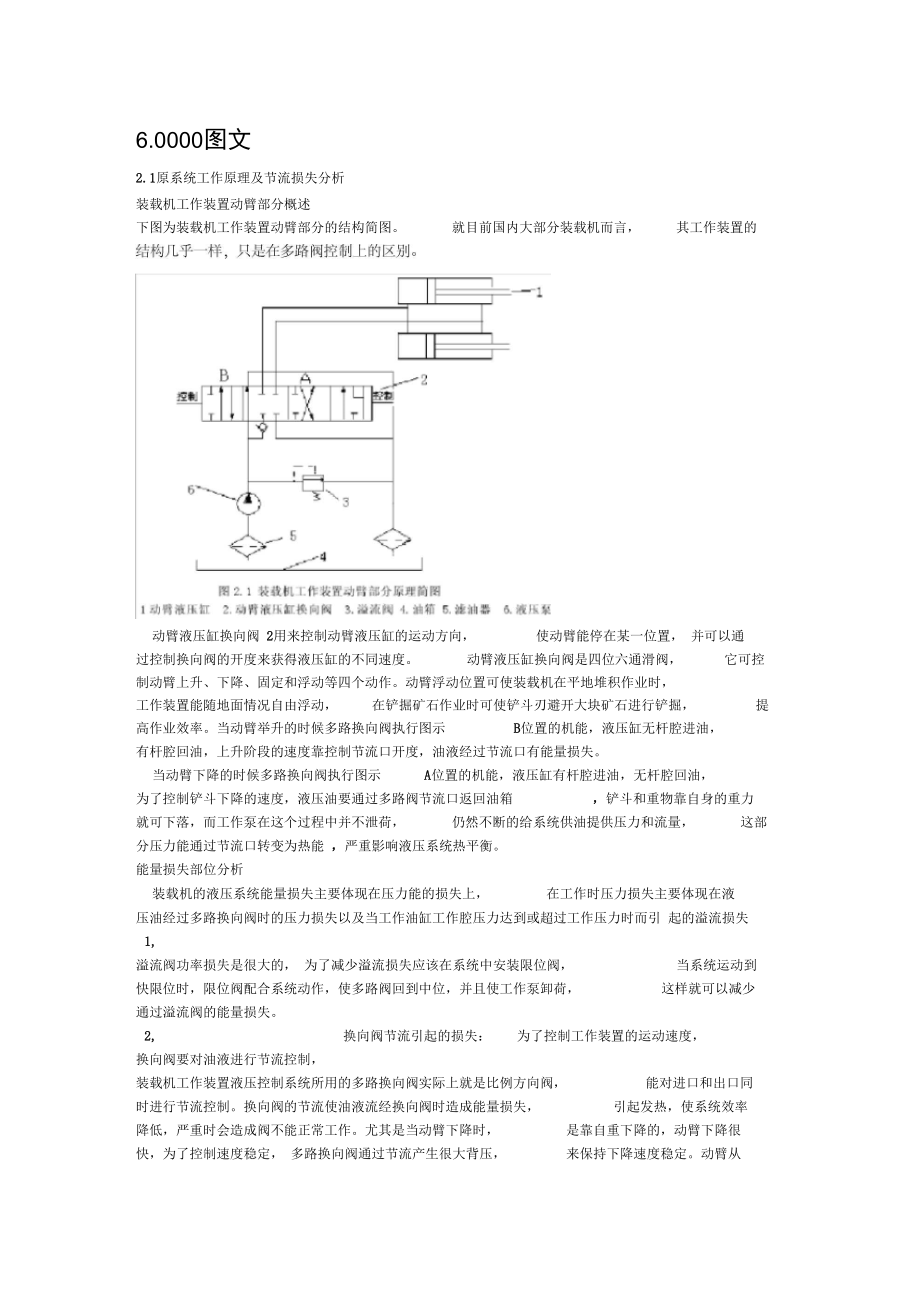
下圖為裝載機(jī)工作裝置動(dòng)臂部分的結(jié)構(gòu)簡圖�。 就目前國內(nèi)大部分裝載機(jī)而言, 其工作裝置的
動(dòng)臂液壓缸換向閥 2用來控制動(dòng)臂液壓缸的運(yùn)動(dòng)方向�, 使動(dòng)臂能停在某一位置, 并可以通
過控制換向閥的開度來獲得液壓缸的不同速度�。 動(dòng)臂液壓缸換向閥是四位六通滑閥, 它可控
制動(dòng)臂上升�、下降、固定和浮動(dòng)等四個(gè)動(dòng)作�。動(dòng)臂浮動(dòng)位置可使裝載機(jī)在平地堆積作業(yè)時(shí), 工作裝置能隨地面情況自由浮動(dòng)�, 在鏟掘礦石作業(yè)時(shí)可使鏟斗刃避開大塊礦石進(jìn)行鏟掘, 提
高作業(yè)效率�。當(dāng)動(dòng)臂舉升的時(shí)候多路換向閥執(zhí)行圖示 B位置的機(jī)能,液壓缸無
2�、桿腔進(jìn)油�,
有桿腔回油�,上升階段的速度靠控制節(jié)流口開度,油液經(jīng)過節(jié)流口有能量損失�。
當(dāng)動(dòng)臂下降的時(shí)候多路換向閥執(zhí)行圖示 A位置的機(jī)能,液壓缸有桿腔進(jìn)油�,無桿腔回油,
為了控制鏟斗下降的速度�,液壓油要通過多路閥節(jié)流口返回油箱 �,鏟斗和重物靠自身的重力
就可下落,而工作泵在這個(gè)過程中并不泄荷�, 仍然不斷的給系統(tǒng)供油提供壓力和流量, 這部
分壓力能通過節(jié)流口轉(zhuǎn)變?yōu)闊崮?�,嚴(yán)重影響液壓系統(tǒng)熱平衡。
能量損失部位分析
裝載機(jī)的液壓系統(tǒng)能量損失主要體現(xiàn)在壓力能的損失上�, 在工作時(shí)壓力損失主要體現(xiàn)在液
壓油經(jīng)過多路換向閥時(shí)的壓力損失以及當(dāng)工作油缸工作腔壓力達(dá)到或超過工作壓力時(shí)而引 起的溢流損
3、失
1, 溢流閥功率損失是很大的�, 為了減少溢流損失應(yīng)該在系統(tǒng)中安裝限位閥, 當(dāng)系統(tǒng)運(yùn)動(dòng)到
快限位時(shí)�,限位閥配合系統(tǒng)動(dòng)作,使多路閥回到中位�,并且使工作泵卸荷, 這樣就可以減少
通過溢流閥的能量損失�。
2, 換向閥節(jié)流引起的損失: 為了控制工作裝置的運(yùn)動(dòng)速度, 換向閥要對油液進(jìn)行節(jié)流控制�,
裝載機(jī)工作裝置液壓控制系統(tǒng)所用的多路換向閥實(shí)際上就是比例方向閥, 能對進(jìn)口和出口同
時(shí)進(jìn)行節(jié)流控制。換向閥的節(jié)流使油液流經(jīng)換向閥時(shí)造成能量損失�, 引起發(fā)熱,使系統(tǒng)效率
降低�,嚴(yán)重時(shí)會(huì)造成閥不能正常工作。尤其是當(dāng)動(dòng)臂下降時(shí)�, 是靠自重下降的,動(dòng)臂下降很
快�,為了控制速度穩(wěn)定, 多路換向閥通過
4�、節(jié)流產(chǎn)生很大背壓, 來保持下降速度穩(wěn)定�。動(dòng)臂從
頂端限位到換向閥開始換向,動(dòng)臂處于下降狀態(tài)�,壓力急劇下降,動(dòng)臂油缸下腔的壓力趨于
穩(wěn)定狀態(tài)�,但是為了保證下降的穩(wěn)定,油缸下腔要通過多路換向閥節(jié)流產(chǎn)生背壓�, 從下圖可
以看出,空載下降的背壓為 3.2aMP�,滿載下降的背壓達(dá)到 8aMP左右,顯然背壓很大�,會(huì) 造成很大背壓損失,由功率損失公式:
N =牡pQt (W)
式中『一丄作周期
Ap—適過幼臂液伍紅換向閥的LL力羞< )
Q —通過動(dòng)晉液JK忙換向閥的流址(Z/min)
J 一動(dòng)臂下降的時(shí)問(5)
從上面式子可以看出�,為了減少背壓產(chǎn)生的能量損失,要盡量減少通過多路換向閥的流
5�、 量控制好換向閥節(jié)流不但減少換向閥本身消耗的能量損失�, 而且也可以減少管路上單向閥的
壓損失�。從而能減少工作裝置工作過程消耗的能量。 所以在保持系統(tǒng)穩(wěn)定情況下�, 減小換向
閥的節(jié)流是猶為重要的問題。
2.2改進(jìn)系統(tǒng)工作原理及能量損失分析
閥的結(jié)構(gòu)設(shè)計(jì)上�,這方面的工作已趨于完善。因此�,進(jìn)一步的研究工作要擴(kuò)展到換向閥 結(jié)構(gòu)以外的范圍。手動(dòng)先導(dǎo)比例減壓閥液控?fù)Q向閥:
罔2"裝栽機(jī)1作裝譽(yù)先昴押制卜渤杵搐竹段進(jìn)原理荷開
1朋杵箍壓缸 比硒臂液爪計(jì)撫向閥 艮盜流閥4 .油締氐養(yǎng)袖器6 ■池壓泵 人練
希樂佝取I &飽益利
如圖2.8為裝載機(jī)工作裝置先導(dǎo)控制下動(dòng)臂部分改進(jìn)原理簡圖�,
6、當(dāng)動(dòng)臂上升的時(shí)候�,多 路閥處于A位置,與原系統(tǒng)相同�,當(dāng)動(dòng)臂下降的時(shí)候�,多路閥處于 B位,從先導(dǎo)系統(tǒng)過來
的壓力油打開液控單向閥 7,油缸兩腔實(shí)現(xiàn)差動(dòng)連接�,并且此時(shí)卸荷閥 8打開,工作泵直接
泄荷回到油箱�,無桿腔的油液一部分流入有桿腔給有桿腔補(bǔ)油, 多余的油液經(jīng)過多路閥節(jié)流
回到油箱�,實(shí)現(xiàn)對動(dòng)臂下降速度的控制, 這樣�,由于工作泵的泄荷并且系統(tǒng)實(shí)現(xiàn)差動(dòng), 通過
多路閥節(jié)流回到油箱的油液減少�,從而減少了經(jīng)過多路閥的節(jié)流損失�。
223改進(jìn)系統(tǒng)能量損失的分析
當(dāng)無桿腔進(jìn)油�,有桿腔回油時(shí),即動(dòng)臂處于舉升階段�,此時(shí)系統(tǒng)執(zhí)行功能和原系統(tǒng)相同, 為阻性負(fù)載壓降的回路系統(tǒng)�, 能量損失和原系統(tǒng)一樣再此不
7、在介紹�。 當(dāng)動(dòng)臂處于下降階段時(shí)
采執(zhí)行差動(dòng)連接的形式, 此時(shí)工作泵泄荷�,動(dòng)臂下降靠自重,無桿腔排出的油液給有桿腔補(bǔ) 油�,多余的液壓油經(jīng)節(jié)流回到油箱以控制下降的速度。
2.4改進(jìn)系統(tǒng)下降穩(wěn)定性分析
陽珂—兒)
乍流口的流電系敵
越巧-閥芯槍移為xF的通流面積
Q—液壓汕的密度
由式(2.52)可知Cd�、P、(A1_A2)為定值�,每次的負(fù)載 F也是定值,所以要
控制下降的速度�,只需要根據(jù)不同的 F適當(dāng)控制A(x)的大小,所以可以控制動(dòng)臂下降的速
度�,系統(tǒng)可以達(dá)到穩(wěn)定程度。
第三章蓄能器為先導(dǎo)系統(tǒng)供油節(jié)能研究
由動(dòng)臂和鏟斗組成的�,裝載機(jī)工作裝置的操縱控制,主要是通過軟軸操縱多路
8�、閥進(jìn)行控 制的,這種操縱方式操縱力很大�,勞動(dòng)強(qiáng)度大�,作業(yè)效率低�。 近年來在少數(shù)的裝載機(jī)上采用
了液壓先導(dǎo)控制多路閥,液壓先導(dǎo)操縱具有安全�、舒適、布置靈活及易于實(shí)現(xiàn)無級(jí)調(diào)速�,工 作液壓系統(tǒng)采用了小流量的先導(dǎo)油路控制高壓大流量的主油路, 使工作裝置的操縱力大為降
低等優(yōu)點(diǎn)�,而日益廣泛地采用, 這種控制系統(tǒng)需要除了工作和轉(zhuǎn)向泵以外的獨(dú)立壓力源�, 由
于各個(gè)生產(chǎn)廠家不同、車型不同�,所以它的壓力源也就有不同的形式。
3.1液壓先導(dǎo)系統(tǒng)壓力源的形式
1)先導(dǎo)泵+穩(wěn)流閥�、溢流閥+選擇閥
此系統(tǒng)當(dāng)發(fā)動(dòng)機(jī)轉(zhuǎn)速在千轉(zhuǎn)以上,先導(dǎo)壓力油通過穩(wěn)流閥使先導(dǎo)油流量穩(wěn)定在 8 — 12
L/min (視不同機(jī)型
9�、確定),溢流閥將先導(dǎo)壓力穩(wěn)定在 2.5— 3.5MPa選擇閥起發(fā)動(dòng)機(jī)熄火降臂 作用�。該系統(tǒng)又分卡特型(圖 3.1)和普通型(圖3.2)
[12]
2)制動(dòng)泵+充液閥+穩(wěn)流閥�、溢流閥+選擇閥
由于液壓濕式制動(dòng)橋在工程機(jī)械上的應(yīng)用逐漸普遍,許多制動(dòng)系統(tǒng)采用充液閥�,這就為 先導(dǎo)系統(tǒng)提供了又一個(gè)壓力源??梢圆捎脹_液閥口接穩(wěn)流閥、溢流閥的方式獲得先導(dǎo)油源�, 這個(gè)方式可優(yōu)先保證沖液的情況下提供穩(wěn)定的先導(dǎo)油源�,如下圖( 3.3)
3)工作泵+多路閥內(nèi)置減壓閥
這種系統(tǒng)(如下圖 3.4)是美國HUSCO公司7100系列多路閥所提供的內(nèi)置減壓閥�,它 將主系統(tǒng)的油壓減小到 3MPa供給先導(dǎo)回路。
10�、
一
1*13.3制動(dòng)泵+紅件御式壓力源
H3.4冬蹄閥內(nèi)重減圧闞式樂力潭
4)力士樂先導(dǎo)壓力閥塊
這種系統(tǒng)(下圖 3.5)是德國力士樂公司的 MHSTE5G型先導(dǎo)供油系統(tǒng),它通過梭閥將
主系統(tǒng)的最高油壓取出后減小到 3.5MPa供給先導(dǎo)回路
Pl P2
二學(xué)性山32-0. Thx
vA
1 3.5/5MFa
i—| Irtajc 0. 2MPa
陽rs力七樂先聊廂力贈(zèng)頼式汗力瀝
3.2先導(dǎo)泵為先導(dǎo)系統(tǒng)供油分析
先導(dǎo)泵供油系統(tǒng)的原理
雖然�,液壓先導(dǎo)系統(tǒng)壓力源有很多種不同的形式,但是�,目前國內(nèi)裝載機(jī)采用液壓先 導(dǎo)系統(tǒng)控制多路閥的壓力源,大
11�、都是用定量齒輪泵做先導(dǎo)泵給其提供的。
■ 了片—
i
ms先泉他先導(dǎo)油対I w裁魚潰圧糸逾心js n
「動(dòng)畔油肛 丄轉(zhuǎn)斗湘乩 玄#躋腳先導(dǎo)閥 彳先導(dǎo)錄&轉(zhuǎn)I訕泵
先導(dǎo)工作液壓系統(tǒng)主要由液壓油箱�、工作泵、多路閥�、先導(dǎo)閥、動(dòng)臂油缸�、轉(zhuǎn)斗油缸、 油管等部件組成它采用了掬于小流量的先導(dǎo)油路控制高壓大流量的主油路�, 并在低壓小流量
的先導(dǎo)油路上設(shè)有油路安全鎖定閥, 安全鎖定閥是為了防止誤操作而設(shè)置的�, 它是一個(gè)二位
二通電磁換向閥,當(dāng)電磁鐵處于斷電位置時(shí)�,也就是駕駛員將開關(guān)置于“關(guān)閉”的位置時(shí), 對手柄的任何操作都不會(huì)對工作裝置產(chǎn)生任何動(dòng)作�。 當(dāng)安全鎖定閥的開關(guān)處于 “開啟”位置
12、時(shí)�,控制油液進(jìn)入電液比例先導(dǎo)控制閥�, 通過操作手柄控制電液比例先導(dǎo)控制閥完成對動(dòng)臂
和鏟斗的動(dòng)作控制�。
上圖中下部分是先導(dǎo)油路, 主要由先導(dǎo)泵�、先導(dǎo)閥等組成。先導(dǎo)泵流出的先導(dǎo)油經(jīng)油路 安全鎖定閥�,再到先導(dǎo)閥,以控制多路閥主油路�。 上部分是主油路,主要由工作泵�、多路閥、 安全溢流閥�、補(bǔ)油閥等組成。在先導(dǎo)控制油的作用下�,通過多路閥滑閥不同的開啟方向,從 而改變工作油液的流動(dòng)方向�, 實(shí)現(xiàn)轉(zhuǎn)斗油缸和動(dòng)臂油缸的不同的運(yùn)動(dòng)方向, 或者使鏟斗與動(dòng)
臂保持在某一位置以滿足裝載機(jī)各種作業(yè)動(dòng)作的要求�。
從上圖及原理可以看出,這個(gè)系統(tǒng)的先導(dǎo)壓力源是有定量齒輪泵 5通過一個(gè)溢流閥組成
的�,雖然定量齒輪泵的價(jià)
13、格低廉�,性能穩(wěn)定�, 它可以穩(wěn)定的給先導(dǎo)系統(tǒng)提供壓力油,但是由
于系統(tǒng)的原理及工作過程決定�,這種壓力源存在大量的能量損耗�。
322先導(dǎo)泵供油系統(tǒng)的缺陷
用先導(dǎo)泵的液壓先導(dǎo)操縱有明顯的能量損耗�。 裝載機(jī)工作過程,大致為鏟裝�、收斗、運(yùn)
輸�,卸斗、動(dòng)臂下降�,在這個(gè)過程中如運(yùn)輸?shù)葼顟B(tài),工作裝置不工作�,多路閥處于中位狀態(tài) 時(shí),整個(gè)先導(dǎo)系統(tǒng)也就處于封閉的狀態(tài)�, 這樣從先導(dǎo)泵流出的油液不給系統(tǒng)供油, 全部經(jīng)過
溢流閥到油箱�,溢流閥是元件中功率損失較大的元件, 經(jīng)過溢流閥損失的壓力能最終會(huì)轉(zhuǎn)化
為熱能�,會(huì)嚴(yán)重影響到熱平衡, 對整個(gè)系統(tǒng)產(chǎn)生不良影響�, 而且只要裝載機(jī)發(fā)動(dòng)機(jī)運(yùn)轉(zhuǎn)先導(dǎo)
泵就會(huì)不停的工作,
14�、這樣會(huì)給先導(dǎo)系統(tǒng)的可靠性帶來不良的影響, 所以說用先導(dǎo)泵給先導(dǎo)系
統(tǒng)供油對系統(tǒng)熱平衡和可靠性都會(huì)產(chǎn)生不良效果�。
3.3蓄能器為先導(dǎo)系統(tǒng)供油分析
蓄能器為先導(dǎo)系統(tǒng)供油概述
蓄能器是一種用來貯存和釋放液壓能的裝置?合理利用蓄能器是節(jié)約能源的手段之一。 因蓄能器是用來蓄積或儲(chǔ)存液壓能的容器�,它的具體用途歸納如下:
(1) 作儲(chǔ)存能量用。若機(jī)器在一個(gè)工作循環(huán)中其最大需油量比平均流量大很多時(shí),可在系 統(tǒng)中裝一臺(tái)蓄能器來補(bǔ)充峰值流量的需要�,以減少油泵和原動(dòng)機(jī)的容量,并降低運(yùn)轉(zhuǎn)費(fèi)用�。
(2) 緩沖和吸振。系統(tǒng)安裝蓄能器來吸收能量�,可以減小系統(tǒng)的壓力沖擊和緩和壓力脈動(dòng)。
(3) 作應(yīng)急能源�。蓄能
15、器可以作為油泵發(fā)生故障或突然停電時(shí)的應(yīng)急能源�。
(4) 保壓。對于執(zhí)行機(jī)構(gòu)不動(dòng)作而又需要保持恒定壓力的系統(tǒng)�,設(shè)置蓄能器后,在保壓的 同時(shí)�,油泵可卸荷,避免功率損耗�。對于間歇運(yùn)行的液壓系統(tǒng).或在一個(gè)工作循環(huán)內(nèi)速度差
別很大.即對油泵供油量的要求差別很大, 這樣的液壓系統(tǒng)使用蓄能器.在其需要供油量大
時(shí)�,讓蓄能器與泵一起供油,這樣便可選用較小流量的泵�,不但減小傳動(dòng)功率,還可減小泵 源占地面積�,節(jié)省投資?;谛钅芷髯鰟?dòng)力源的作用,所以它可以給先導(dǎo)系統(tǒng)提供壓力油源�。
蓄能器為先導(dǎo)系統(tǒng)供油原理
nxs stt器個(gè)先詁ttfer匸作裝買液壓廉統(tǒng)UJ1圏
I?動(dòng)■紬M 2.訶斗油泣3齢畸
16�、閥4.光制闕5?蓄碟器出單向閔匸轉(zhuǎn)向豪
此系統(tǒng)同先導(dǎo)泵為先導(dǎo)供油系統(tǒng)的差別如圖所示�,用單向閥 6和蓄能器5取代原來的先
導(dǎo)泵�,從裝載機(jī)工作過程來看, 出于安全方面的因素�, 整個(gè)工作過程很少有工作裝置和轉(zhuǎn)向 系統(tǒng)同時(shí)工作的情況,這樣在轉(zhuǎn)向系統(tǒng)不工作時(shí)�,轉(zhuǎn)向泵 7通過單向閥6為蓄能器5充油,
蓄能器充滿是個(gè)很短暫的過程, 當(dāng)蓄能器充滿時(shí)轉(zhuǎn)向泵 7多余的油液將回到油箱�,當(dāng)工作裝
置需要?jiǎng)幼鲿r(shí),蓄能器 5的油液迅速釋放�,為先導(dǎo)系統(tǒng)提供壓力油,控制工作裝置的運(yùn)動(dòng)�, 整個(gè)系統(tǒng)的原理來看,只要轉(zhuǎn)向系統(tǒng)不工作�, 轉(zhuǎn)向泵就為蓄能器充油, 直到充滿為止�,這樣
蓄能器就可以有足夠的液壓油,源源不斷的為先導(dǎo)
17�、系統(tǒng)供油。
334蓄能器為先導(dǎo)系統(tǒng)供油優(yōu)點(diǎn)
從以上介紹的兩種不同的壓力源為先導(dǎo)系統(tǒng)供油原理可以看出�, 用蓄能器為先導(dǎo)系統(tǒng)供
油,這樣可以取代先導(dǎo)泵�,減少油液的能量損失。 所以蓄能器為先導(dǎo)系統(tǒng)提供油源�,由轉(zhuǎn)向
泵間歇性為蓄能器供油?就原系統(tǒng)而言�,無論是先導(dǎo)系統(tǒng)正常工作還是處于溢流統(tǒng)取消先導(dǎo) 泵�,它相對于改后的系統(tǒng)都是能量損失, 如果不分能量最終要由液壓能會(huì)轉(zhuǎn)為熱能�, 影響系
統(tǒng)的熱平衡,而的動(dòng)作�,這樣也比原系統(tǒng)提高了可靠性。
整個(gè)工作液壓系統(tǒng)模型分析
由蓄能器為先導(dǎo)系統(tǒng)供油�, 工作泵為定量的齒輪泵, 且有溢流閥�,當(dāng)達(dá)到一定壓力時(shí)工 作泵溢流,所以整個(gè)工作裝置的系統(tǒng)模型的建立可以把工
18�、作泵的壓力視為常數(shù), 又先導(dǎo)系統(tǒng)
的換向閥只是起到換向的作用�, 對先導(dǎo)系統(tǒng)的壓力影響可以忽略, 故液壓系統(tǒng)可簡化為下圖:
ffi3.ll HkJl-泵冼L什裝陰FW�;制桶引
上面為電液比例減壓閥
從上式可以看出,負(fù)載的流量變化和比例減壓閥的輸出壓力是線性關(guān)系�, 也就是說,如果比
例減壓閥的輸出壓力是穩(wěn)定的那么負(fù)載的速度就是穩(wěn)定的�。由比例減壓閥的原理可以知道, 無論比例減壓閥的輸入壓力 P怎樣變化�,系統(tǒng)的輸出壓力 Pc總是穩(wěn)定的值,也就是說�,雖
然蓄能器的輸出壓力是變化的,隨著氣體體積的增大而減小�,但是蓄能器的輸出壓力 P經(jīng)
過比例減壓閥后的輸出壓力 Pc是穩(wěn)定的�,對負(fù)載的
19�、運(yùn)動(dòng)是穩(wěn)定的,系統(tǒng)的穩(wěn)定程度取決于
比例減壓閥的動(dòng)態(tài)特性�,和整個(gè)系統(tǒng)的總體匹配情況。
第四章工作泵的節(jié)能研究
裝載機(jī)在不同工況時(shí)動(dòng)力源的能量消耗往往有很大差別�。 供過于求�,動(dòng)力源的輸出流量
過剩和壓力過剩?是造成能耗的根本原因。所以提高匹配效率是動(dòng)力源節(jié)能的最有效辦法�, 也就是要流量適應(yīng)動(dòng)力源, 即泵供給系統(tǒng)的流量自動(dòng)地和需要量相適應(yīng)�、 沒有流量過剩,它
能將流量損失減到最小的程度�。但是要實(shí)現(xiàn)流量適應(yīng)控制必須采用變量泵。 而變量泵的價(jià)格
高�,裝載機(jī)的生產(chǎn)廠家為了占據(jù)市場, 就要降低成本�,所以目前國內(nèi)的裝載機(jī)大部分的壓力
源采用的是定量齒輪泵。 定量泵具有簡單�、價(jià)廉、 可靠等許多優(yōu)
20�、點(diǎn),所以若能根據(jù)工況特點(diǎn)
采用簡單措施合理利用其輸出能量�,也能達(dá)到一定的節(jié)能效果。
4.1單工作泵系統(tǒng)分析
單工作泵系統(tǒng)結(jié)構(gòu)和原理
下圖為裝載機(jī)單工作泵工作裝置液壓系統(tǒng)原理圖�, 目前裝載機(jī)的工作液壓系統(tǒng)的實(shí)現(xiàn)方
式有幾種不同的類型�, 但大部分只是多路閥的控制方式不同�, 動(dòng)力源部分基本相同, 所以本
文就以下面的普通�、常見的 50型裝載機(jī)液壓系統(tǒng)來做以分析。
動(dòng)臂液壓缸換向閥 3和轉(zhuǎn)斗液壓缸換向閥 4�,用來控制轉(zhuǎn)斗液壓缸的和動(dòng)臂液壓缸的 運(yùn)動(dòng)方向,使鏟斗和動(dòng)臂能停在某一位置�,并可以通過控制換向閥的開度來獲得液壓缸的不 同速度。轉(zhuǎn)斗液壓缸換向閥是三位六通滑閥�, 它可控制鏟斗前傾、 后
21�、傾和固定在某一位置等
三個(gè)動(dòng)作;動(dòng)臂液壓缸換向閥是四位六通滑閥�,它可控制動(dòng)臂上升、下降�、 固定和浮動(dòng)等四
個(gè)動(dòng)作。動(dòng)臂浮動(dòng)位置可使裝載機(jī)在平地堆積作業(yè)時(shí)�, 工作裝置能隨地面情況自由浮動(dòng), 在
鏟掘礦石作業(yè)時(shí)可使鏟斗刃避開大塊礦石進(jìn)行鏟掘�,提高作業(yè)效率。
:f 1 2儒壓世:松-茂科液圧氛唏
6. 玄 誌油誓 9 AJ4即疋存曲疋定間 10.仃桿昵理作用蛋金需
11
無桿腔雙作用安全閥 9和有桿腔雙作用安全閥 10.它由過載閥和單向閥組成�, 并聯(lián)裝在轉(zhuǎn)斗 液壓缸的回路上,過載閥一般壓力調(diào)定在�,無桿腔雙作用安全閥為 16aMP,有桿腔雙作用
安全閥為8aMP其作用由三個(gè):
22�、
a) 當(dāng)轉(zhuǎn)斗液壓缸滑閥在中位時(shí)�,轉(zhuǎn)斗液壓缸前后腔均閉死�,如鏟斗受到額外沖擊載荷,引
起局部油路壓力劇升�, 將導(dǎo)致?lián)Q向閥和液壓缸之間的元件、 管路的破壞�。設(shè)置過載閥即能緩
沖該過載油壓。
b) 在動(dòng)臂升降過程中�,使轉(zhuǎn)斗液壓缸自動(dòng)進(jìn)行泄油和補(bǔ)油。 裝載機(jī)連桿機(jī)構(gòu)上設(shè)有限位塊�,
當(dāng)動(dòng)臂在升降至某一位置時(shí)�,可能會(huì)出現(xiàn)連桿機(jī)構(gòu)的干涉現(xiàn)象。 例如動(dòng)臂在提升至某一位置
時(shí)�,會(huì)迫使轉(zhuǎn)斗液壓缸的活塞桿向外拉出, 造成轉(zhuǎn)斗液壓缸前腔壓力劇升�, 可能損壞油圭寸和
油管,但由于有過載閥�,可使困在液壓缸前腔中的油經(jīng)過過載閥泄出, 返回油箱�。而同時(shí)后
腔容積增大,造成局部真空�,緩沖補(bǔ)油閥中的單向閥隨即打開
23、�,向轉(zhuǎn)斗油缸后腔補(bǔ)油。
c) 裝載機(jī)在卸載時(shí)�,能實(shí)現(xiàn)鏟斗靠自重快速下翻�,并順勢撞擊限位塊�,使斗內(nèi)剩料卸凈。
當(dāng)卸料時(shí)�,壓力油進(jìn)入轉(zhuǎn)斗液壓缸前腔實(shí)現(xiàn)轉(zhuǎn)斗。 當(dāng)鏟斗重心越過斗下鉸點(diǎn)后�, 鏟斗在重力
作用下加速翻轉(zhuǎn),但其速度受到液壓泵供油速度的限制�, 由于緩沖補(bǔ)油閥中的單向閥及時(shí)向
轉(zhuǎn)斗液壓缸前腔補(bǔ)油,使鏟斗能快速下翻�,撞擊限位塊,實(shí)現(xiàn)撞斗卸料�。
單工作泵系統(tǒng)缺陷
從上面工作裝置液壓系統(tǒng)原理及結(jié)構(gòu)可以看出, 當(dāng)動(dòng)臂和鏟斗處于限位或動(dòng)臂升降�、 鏟
斗鏟掘遇到嚴(yán)重阻礙時(shí),壓力會(huì)逐漸的升高�,當(dāng)壓力超過動(dòng)臂和鏟斗的溢流閥調(diào)定的額定工
作壓力時(shí),溢流閥打開�,油液通過溢流閥回油箱, 在這個(gè)過程中
24�、損失大量的壓力能,這部分
壓力能最終要變成熱能�,影響系統(tǒng)的熱平衡,這部分能量損失占裝載機(jī)液壓系統(tǒng)能量損失的 很大部分�,因?yàn)樘幱谙到y(tǒng)安全的考慮,安全閥一定要存在系統(tǒng)當(dāng)中,并且系統(tǒng)保壓溢流也一 定要存在�,但是通過溢流閥的油液過多,這是單泵系統(tǒng)的缺陷�。由于裝載機(jī)的實(shí)際工作情況, 裝載機(jī)在鏟掘時(shí)�,需要的是高壓小流量增加鏟掘力, 而鏟斗離開料堆負(fù)載變小�,所以升起的
過程中,需要低壓大流量增加上升的速度�, 基于以上的工作特點(diǎn)就可以采用雙泵合分流系統(tǒng),
盡量讓流量和系統(tǒng)的需要所匹配�,減小系統(tǒng)的能量損失。
4.3改進(jìn)系統(tǒng)分析
改進(jìn)系統(tǒng)的結(jié)構(gòu)及原理
下圖為針對原系統(tǒng)的缺陷改進(jìn)后的工作裝置結(jié)構(gòu)及原理圖
25�、, 和原系統(tǒng)的主要差別是動(dòng)力
源部分�,由原來的單泵改為兩個(gè)等排量的串聯(lián)泵�。
從上圖可以看出,系統(tǒng)的由兩個(gè)等排量泵�,通過單向閥 12和卸荷閥14合分流,除了
動(dòng)力源部分�,其余的結(jié)構(gòu)和原理和原系統(tǒng)相同。系統(tǒng)中的卸荷閥 14卸荷壓力調(diào)定在
8aMP�,當(dāng)裝載機(jī)進(jìn)行工作的時(shí)候, 主油路的壓力高于卸荷壓力調(diào)定在 8aMP時(shí)�,泵13卸
荷回到油箱,當(dāng)壓力不足以開啟卸荷壓力調(diào)定的壓力時(shí)�,泵 13通過單向閥12和泵6合
流�,給系統(tǒng)提供大的流量�,當(dāng)系統(tǒng)合流時(shí)和原系統(tǒng)是等同的。
雙工作泵系統(tǒng)的優(yōu)點(diǎn)
由于針對單工作泵系統(tǒng)的缺陷做出系統(tǒng)改進(jìn)�,顯然改進(jìn)后的系統(tǒng)自然是從減少能量損失
為出發(fā)點(diǎn),從改
26�、后系統(tǒng)的原理可以看出, 動(dòng)力源部分基本是通過雙泵的合分流�, 來盡量達(dá)到
變量泵的效果,做到流量適應(yīng)控制�,以減少不必要的損失。當(dāng)裝載機(jī)進(jìn)行鏟掘動(dòng)作時(shí)�, 需要
大的壓力來提供鏟掘力, 并且在這個(gè)過程中�,鏟斗的收放斗和動(dòng)臂的提升交替進(jìn)行, 并且速
度比較慢�,顯然,這個(gè)過程中油缸的運(yùn)動(dòng)速度�,不能使油缸全部吸收工作泵排出的油液,因 此系統(tǒng)的壓力升高�,部分油液要從溢流閥回到油箱, 如果是原系統(tǒng)�,那么工作泵的排出油液
大部分要從高壓溢流閥流走,而對于改進(jìn)后的系統(tǒng)�,由于系統(tǒng)采用雙泵控制,并其中的一個(gè) 泵13聯(lián)有卸荷閥14,當(dāng)壓力超過卸荷閥的壓力時(shí),卸荷閥 14打開�,泵13低壓卸荷回
到油箱。當(dāng)裝載機(jī)
27�、工作過程中遇到嚴(yán)重阻力或限位時(shí)依然是一個(gè)泵卸荷,一個(gè)泵工作�, 顯
然這些情況比原系統(tǒng)至少一半的流量通過溢流閥,因此少損失的很多的壓力能�。
如圖4.4雙泵共同工作滿載工況動(dòng)臂上升時(shí)的壓力變化, 動(dòng)臂下腔壓力在鏟斗運(yùn)動(dòng)所
產(chǎn)生的慣性力作業(yè)下�,經(jīng)過初期的壓力波動(dòng)后,壓力平穩(wěn)上升�。這個(gè)過程兩個(gè)泵的壓力變化 一至,并且在上升過程中�,兩個(gè)泵的壓力都在 8MPa以下,所以這也是把一個(gè)工作泵的卸
荷壓力調(diào)定在 8MPa的原因�,如果卸荷壓力小于 8MPa那么就有可能在動(dòng)臂滿載上升過程 中一泵卸荷不能實(shí)現(xiàn)快速上升,如果壓力大于 8MPa�,那么會(huì)有更多的壓力損失。在當(dāng)動(dòng)
臂達(dá)到頂點(diǎn)限位時(shí)�,一個(gè)泵立刻卸荷�,
28、壓力急劇下降�,如圖虛線部分為卸荷泵壓力變化過程, 實(shí)線部分給系統(tǒng)提供壓力�,頂端壓力為溢流閥開啟的壓力,這個(gè)壓力在多路閥換向時(shí)下降。
:嚼寒工作空'"出.fii 1^2
L3 :礦瓦:d 2V)嗣土頻率OOSz
圖4.5為雙泵系統(tǒng)動(dòng)臂起升到極限位置�,動(dòng)臂處于機(jī)械限位的狀態(tài),動(dòng)臂下腔的壓力 急劇升高�,當(dāng)壓力達(dá)到其中泵 13的卸荷壓力約 8MPa時(shí),泵13的油液卸荷回到油箱�,
如虛線所示,虛線部分的壓力為經(jīng)過卸荷閥的壓力�,此時(shí)由泵 6單獨(dú)供油,當(dāng)壓力達(dá)到
18MPa附近時(shí)溢流閥開啟�,系統(tǒng)的壓力變化的動(dòng)態(tài)過程取決于溢流閥的工作特性。從圖中 可以看出�,一個(gè)泵的油液先卸荷不經(jīng)過溢流閥, 顯然
29�、工作裝置在這種狀態(tài)下, 經(jīng)過溢流閥的
流量減少�,即減少了很多的溢流損失。雙泵共同工作動(dòng)臂空載起升時(shí)壓力變化圖�, 動(dòng)臂下腔
壓力在鏟斗運(yùn)動(dòng)所產(chǎn)生的慣性力作業(yè)下, 經(jīng)過初期的壓力波動(dòng)后�, 壓力平穩(wěn)上升,從圖中可
以看出�,兩個(gè)泵在合流過程中的壓力變化平穩(wěn)且是一至的,壓力都小于 8MPa�,此時(shí)是雙
泵大流量實(shí)現(xiàn)快速上升。 雙泵共同工作動(dòng)臂下降工況�,動(dòng)臂上腔進(jìn)油�, 下腔回油�,兩個(gè)泵處
于合流狀態(tài),并且從圖中可以看出�,兩個(gè)泵輸出壓力變化的趨勢相同。
兩個(gè)系統(tǒng)流量比較分析
1)當(dāng)鏟斗掘料時(shí):由裝載機(jī)的實(shí)際工作情況�,多路閥的閥口處于全開狀態(tài)也就是說 A1(x) =A2(x)并且,當(dāng)外負(fù)載F決定著
30�、泵的輸出壓力 Pp,當(dāng)兩個(gè)系統(tǒng)同時(shí)處于掘料時(shí)�, 外力F基本相等,Pp也基本相等�。由公式 (4.2)和(4.4)知Q1原~ Q1改進(jìn)件5)
2 )當(dāng)鏟斗離開料堆時(shí):由于改進(jìn)系統(tǒng)的兩個(gè)液壓泵的輸出流量總和和原系統(tǒng)的液壓泵的 輸出流量相等,所以兩個(gè)系統(tǒng)給液壓缸的輸入流量相等�。
3) 當(dāng)處于頂端限位時(shí): 原系統(tǒng)液壓泵輸出所有的油液全部溢流, 改進(jìn)系統(tǒng)處于分流狀態(tài)�, 一個(gè)泵油液泄荷,一個(gè)泵油液全部溢流�。
4) 當(dāng)動(dòng)臂下降時(shí):動(dòng)臂下降的時(shí)候幾乎是靠自重降落的,此時(shí)原系統(tǒng)和改進(jìn)系統(tǒng)的輸入
流量相等為Q�。顯然,原系統(tǒng)和改進(jìn)系統(tǒng)在不考慮系統(tǒng)泄露時(shí)�, 鏟斗掘料過程給油缸的輸入
流量幾乎是相等的,當(dāng)鏟斗離開料堆時(shí)給油缸的輸入流量也相等�, 限位的時(shí)候�,系統(tǒng)沒有輸
入�,動(dòng)臂下落的時(shí)候�,兩個(gè)系統(tǒng)輸入流量相等,因?yàn)榱髁繘Q定著油缸動(dòng)作速度�,原系統(tǒng)裝載 機(jī)的工作過程中速度是穩(wěn)定的, 所以改進(jìn)后的雙泵合流系統(tǒng)的速度也是穩(wěn)定的�。 改后的系統(tǒng),
裝載機(jī)從掘料一離開料堆升起一頂端限位一下降一掘料�, 在這個(gè)過程中,雙泵系統(tǒng)完成分流
—合流一分流一合流一分流�。雖然在分流和合流的瞬時(shí)流量是變化的, 但是從上面分析可以
看出�,它不影響系統(tǒng)的穩(wěn)定性。綜合以上分析說明�,改進(jìn)后的系統(tǒng)是穩(wěn)定的。
 裝載機(jī)液壓系統(tǒng)設(shè)計(jì)
裝載機(jī)液壓系統(tǒng)設(shè)計(jì)