《(江蘇專用)2020高考物理二輪復(fù)習(xí) 第二部分 考前調(diào)節(jié) 激發(fā)狀態(tài) 方法 規(guī)律 通曉高考4大解題策略教學(xué)案》由會員分享���,可在線閱讀����,更多相關(guān)《(江蘇專用)2020高考物理二輪復(fù)習(xí) 第二部分 考前調(diào)節(jié) 激發(fā)狀態(tài) 方法 規(guī)律 通曉高考4大解題策略教學(xué)案(83頁珍藏版)》請在裝配圖網(wǎng)上搜索。
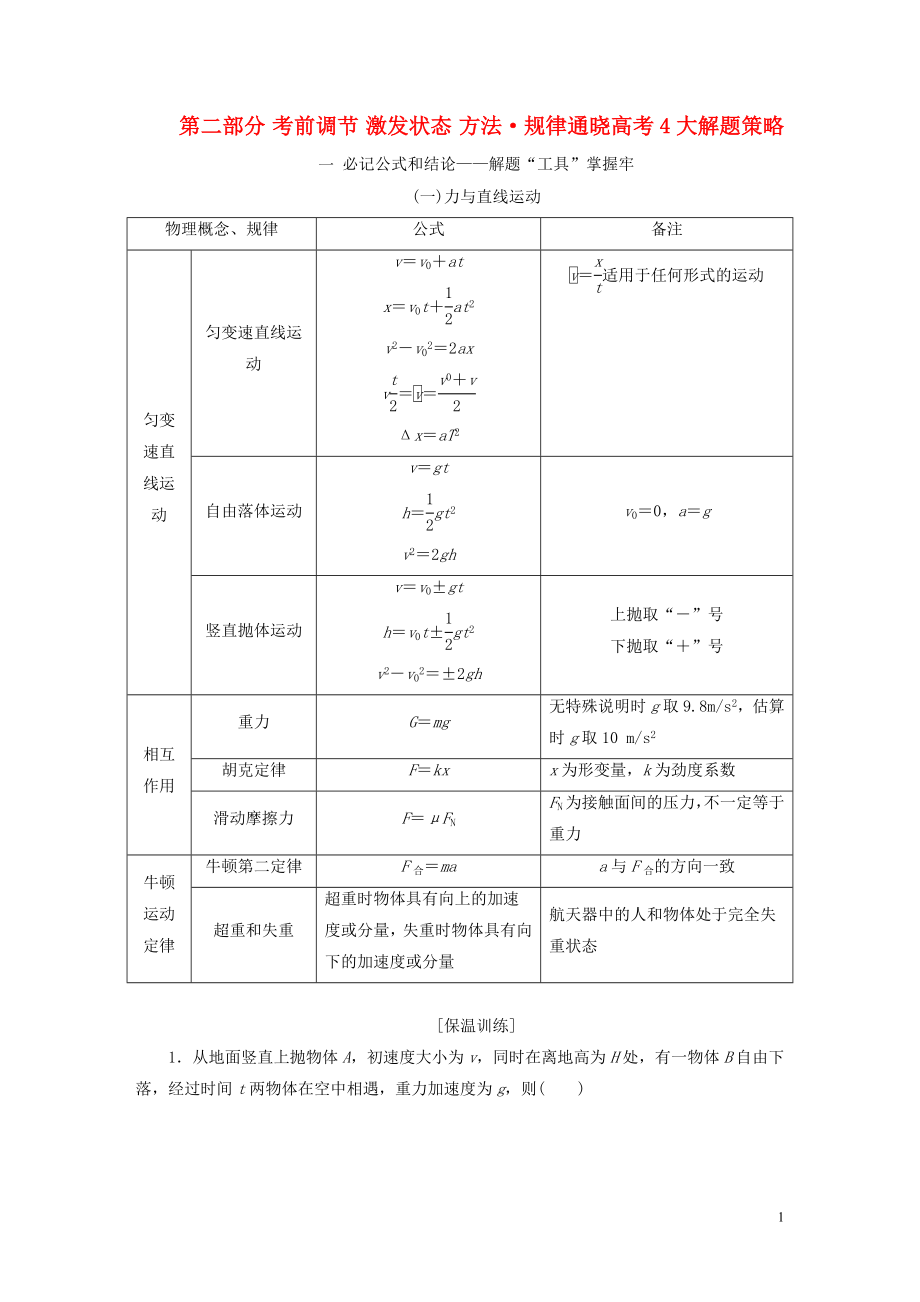
1�、第二部分 考前調(diào)節(jié) 激發(fā)狀態(tài) 方法·規(guī)律通曉高考4大解題策略
一
(一)力與直線運動
物理概念、規(guī)律
公式
備注
勻變速直線運動
勻變速直線運動
v=v0+at
x=v0t+at2
v2-v02=2ax
v==
Δx=aT2
=適用于任何形式的運動
自由落體運動
v=gt
h=gt2
v2=2gh
v0=0��,a=g
豎直拋體運動
v=v0±gt
h=v0t±gt2
v2-v02=±2gh
上拋取“-”號
下拋取“+”號
相互作用
重力
G=mg
無特殊說明時g取9.8 m/s2���,估算時g取10 m/s2
胡克定律
F=kx
x
2、為形變量�,k為勁度系數(shù)
滑動摩擦力
F=μFN
FN為接觸面間的壓力,不一定等于重力
牛頓運動定律
牛頓第二定律
F合=ma
a與F合的方向一致
超重和失重
超重時物體具有向上的加速度或分量�,失重時物體具有向下的加速度或分量
航天器中的人和物體處于完全失重狀態(tài)
[保溫訓(xùn)練]
1.從地面豎直上拋物體A,初速度大小為v��,同時在離地高為H處�,有一物體B自由下落,經(jīng)過時間t兩物體在空中相遇�����,重力加速度為g,則( )
A.t= B.t=
C.t= D.t=
解析:選A 兩物體相遇時位移大小之和等于H�����,故有vt-gt
3、2+gt2=H���,解得t=��,A正確��。
2.以從塔頂由靜止釋放小球A的時刻為計時零點�,t0時刻又在與小球A等高的位置處�,由靜止釋放小球B。若兩小球都只受重力作用�,設(shè)小球B下落時間為t,在兩小球落地前����,兩小球間的高度差為Δx,則 -t0圖線為( )
解析:選B 兩小球釋放后都做自由落體運動����,小球B釋放時為t0時刻���,此時小球A的速度為gt0,小球B的速度為0���,根據(jù)勻變速直線運動規(guī)律��,小球B下落時間為t時����,兩小球下落的高度分別為hA=gt0t+gt2和hB=gt2����,則Δx=hA-h(huán)B=gt0t,=gt0���,由函數(shù)圖像知識���,可知B正確。
3.如圖是某物體在 t時間內(nèi)的位移—時間圖像和速度—時間圖
4�、像,從圖像上可以判斷( )
A.物體的運動軌跡是拋物線
B.物體時間t內(nèi)的平均速度不一定是4.5 m/s
C.物體運動的時間t=2 s
D.物體的加速度為 m/s2
解析:選D 由v -t圖像知��,該物體做勻加速直線運動,運動軌跡是直線���,A錯誤�;根據(jù)勻變速直線運動的平均速度的公式可知��,物體在時間t內(nèi)的平均速度是== m/s=4.5 m/s��,B錯誤����;由x=t得t== s= s���,C錯誤��;物體的加速度為a== m/s2= m/s2�����,D正確����。
4.在平直公路上行駛的a車和b車���,其x-t圖像分別為圖中直線a和曲線b�����,已知b車的加速度恒定且等于-2 m/s2�����,t=3 s時��,直線a和曲線b剛
5���、好相切��,則( )
A.a(chǎn)車做勻速運動且其速度為va= m/s
B.t=3 s時��,a車和b車相遇但此時速度不等
C.t=1 s時�,b車的速度為10 m/s
D.t=0時����,a車和b車的距離x0=9 m
解析:選D 由題圖可知,a車做勻速運動�����,其速度:va== m/s=2 m/s,故A錯誤��;t=3 s時,直線a和曲線b剛好相切,即此時b車的速度vb′=va=2 m/s���,故B錯誤;由b車的加速度等于-2 m/s2易得,t=1 s時�����,b車的速度為6 m/s�����,故C錯誤;設(shè)b車的初速度為vb�,對b車,由vb+at=vb′�,解得 vb=8 m/s,t=3 s時���,a車的位移 xa=vat=6 m����,b
6、車的位移:xb=t=15 m����,此時a車和b車到達同一位置,得x0=xb-xa=9 m�����,故D正確�����。
5.跳傘運動員從高空懸停的直升機跳下����,運動員沿豎直方向運動,其v-t圖像如圖所示�����。下列說法正確的是( )
A.運動員在0~10 s內(nèi)的平均速度大小等于10 m/s
B.10 s末運動員的速度方向改變
C.10 s末運動員打開降落傘
D.10~15 s內(nèi)運動員做加速度逐漸增加的減速運動
解析:選C 若運動員在0~10 s內(nèi)做勻變速直線運動�,則平均速度== m/s=10 m/s,故A錯誤��;在整個過程中,速度都是正值��,運動員的速度方向未改變��,故B錯誤�����;從10 s末開始運動員做減速運動����,則知
7、10 s末運動員打開降落傘����,故C正確;10~15 s內(nèi)圖線的斜率逐漸減小�����,則加速度逐漸減小����,運動員做加速度逐漸減小的減速運動��,故D錯誤。
6.(2019·浙江選考)如圖所示�,A、B����、C為三個實心小球,A為鐵球��,B��、C為木球�。A、B兩球分別連在兩根彈簧上�,C球連接在細線一端,彈簧和細線的下端固定在裝水的杯子底部��,該水杯置于用繩子懸掛的靜止吊籃內(nèi)�����。若將掛吊籃的繩子剪斷��,則剪斷的瞬間相對于杯底(不計空氣阻力�,ρ木<ρ水<ρ鐵)( )
A.A球?qū)⑾蛏线\動,B�、C球?qū)⑾蛳逻\動
B.A、B球?qū)⑾蛏线\動,C球不動
C.A球?qū)⑾蛳逻\動��,B球?qū)⑾蛏线\動��,C球不動
D.A球?qū)⑾蛏线\動��,B球?qū)⑾蛳逻\動����,
8、C球不動
解析:選D 開始時A球下的彈簧被壓縮���,彈力向上��;B球下的彈簧被拉長��,彈力向下����;將掛吊籃的繩子剪斷的瞬時���,系統(tǒng)的加速度為g,為完全失重狀態(tài)��,此時水對球的浮力也為零,小球的重力也視為零��,則A球?qū)⒃趶椓ψ饔孟孪鄬τ诒紫蛏线\動�����,B球?qū)⒃趶椓ψ饔孟孪鄬τ诒紫蛳逻\動���,C球相對于杯底不動�����。
7.(2019·天津高考)2018年10月23日���,港珠澳跨海大橋正式開通。為保持以往船行習(xí)慣���,在航道處建造了單面索(所有鋼索均處在同一豎直面內(nèi))斜拉橋���,其索塔與鋼索如圖所示。下列說法正確的是( )
A.增加鋼索的數(shù)量可減小索塔受到的向下的壓力
B.為了減小鋼索承受的拉力��,可以適當降低索塔的高度
9�、C.索塔兩側(cè)鋼索對稱且拉力大小相同時����,鋼索對索塔的合力豎直向下
D.為了使索塔受到鋼索的合力豎直向下���,索塔兩側(cè)的鋼索必須對稱分布
解析:選C 索塔對鋼索豎直向上的作用力跟鋼索和橋體整體的重力平衡��。增加鋼索數(shù)量�,其整體重力變大�,故索塔受到的壓力變大,A錯��。若索塔高度降低�,則鋼索與豎直方向夾角θ將變大,由Tcos θ=G可知���,鋼索拉力T將變大�����,B錯����。兩側(cè)拉力對稱��,合力一定在夾角平分線上,即豎直向下�����,C對���。若鋼索非對稱分布,但其水平方向的合力為0�����,合力仍豎直向下�,D錯。
8.(2019·全國卷Ⅲ)用卡車運輸質(zhì)量為m的勻質(zhì)圓筒狀工件�����,為使工件保持固定�,將其置于兩光滑斜面之間,如圖所示�。兩斜面Ⅰ、
10����、Ⅱ固定在車上�,傾角分別為30°和60°����。重力加速度為g。當卡車沿平直公路勻速行駛時����,圓筒對斜面Ⅰ、Ⅱ壓力的大小分別為F1�、F2,則( )
A.F1=mg�����,F(xiàn)2=mg B.F1=mg���,F(xiàn)2=mg
C.F1=mg�����,F(xiàn)2=mg D.F1=mg�����,F(xiàn)2=mg
解析:選D 如圖所示�,卡車勻速行駛,圓筒受力平衡���,由題意知�����,力F1′與F2′相互垂直。由牛頓第三定律知F1=F1′���,F(xiàn)2=F2′���,則F1=mgsin 60°=mg,F(xiàn)2=mgsin 30°=mg����,選項D正確。
9.[多選](2019·全國卷Ⅲ)如圖(a)��,物塊和木板疊放在實驗臺上���,物塊用一不可伸長的細繩與固定在實驗臺上的力傳感器
11����、相連,細繩水平��。t=0時��,木板開始受到水平外力F的作用�����,在t=4 s時撤去外力���。細繩對物塊的拉力f隨時間t變化的關(guān)系如圖(b)所示�,木板的速度v與時間t的關(guān)系如圖(c)所示�����。木板與實驗臺之間的摩擦可以忽略�。重力加速度取10 m/s2。由題給數(shù)據(jù)可以得出( )
圖(a)
圖(b) 圖(c)
A.木板的質(zhì)量為1 kg
B.2~4 s內(nèi)�����,力F的大小為0.4 N
C.0~2 s內(nèi)���,力F的大小保持不變
D.物塊與木板之間的動摩擦因數(shù)為0.2
解析:選AB 木板和實驗臺間的摩擦忽略不計�,由題圖(b)知,2 s后物塊和木板間的滑動摩擦力大小F摩=0.2 N�。由題
12、圖(c)知���,2~4 s內(nèi)��,木板的加速度大小a1= m/s2=0.2 m/s2��,撤去外力F后的加速度大小a2= m/s2=0.2 m/s2。設(shè)木板質(zhì)量為m���,對木板進行受力分析���,根據(jù)牛頓第二定律可得:F-F摩=ma1,F(xiàn)摩=ma2�����,且知F摩=μm塊g=0.2 N�,解得m=1 kg,F(xiàn)=0.4 N��,由于不知道物塊的質(zhì)量,故無法求出物塊與木板間的動摩擦因數(shù)��,選項A�����、B正確����,D錯誤。0~2 s內(nèi)�,由題圖(b)知,F(xiàn)是均勻增加的����,選項C錯誤。
10.如圖甲所示�,一個可視為質(zhì)點的物塊從傾角為θ=30°的固定斜面頂端由靜止開始下滑,從此時開始計時�����,物塊的速度為v��,到斜面頂端的距離為x�,其x-v2圖像如圖乙所
13�����、示�。g取10 m/s2�,斜面足夠長,不計空氣阻力����,下列說法正確的是( )
A.物塊的加速度大小為8 m/s2
B.物塊在t=1 s時的速度大小為8 m/s
C.物塊在t=4 s時處于斜面上x=24 m的位置
D.物塊與斜面間的動摩擦因數(shù)μ=
解析:選D 由v2=2ax得加速度為a=4 m/s2,故A錯誤��;由v=at得t=1 s時物塊速度大小為4 m/s�,故B錯誤;由x=at2得t=4 s時����,x=32 m����,C錯誤;由牛頓第二定律得:mgsin 30°-μmgcos 30°=ma����,解得:μ=����,故D正確��。
(二)曲線運動��、萬有引力與機械能
物理概念�、規(guī)律
公式
備注
曲線
14、運動
平拋運動
vx=v0�����,vy=gt
x=v0t����,y=gt2
沿水平方向做勻速直線運動,沿豎直方向做自由落體運動
勻速圓周運動
v=
ω=
a==ω2r=r=ωv
F=ma=m=mω2r
v=
ω=
v=ωr
萬有引力定律
萬有引力定律
F=G
引力常量:G=6.67×10-11 N·m2/kg2
功和功率
功
W=Flcos α
α是F與l的夾角
功率
平均功率P=
瞬時功率P=Fvcos α
α是F與v的夾角
機械效率
η=×100%
=×100%
η <1
機械能
動能
Ek=mv2
標量�����,具有相對性
重力勢能
Ep
15���、=mgh
與零勢能面的選擇有關(guān)
動能定理
W合=mv22-mv12
W合為合外力做的功
機械能守恒定律
E1=E2或Ek1+Ep1=Ek2+Ep2
守恒條件:在只有重力或彈力做功的物體系統(tǒng)內(nèi)
[保溫訓(xùn)練]
1.(2019·海南高考)2019年5月�����,我國第45顆北斗衛(wèi)星發(fā)射成功����。已知該衛(wèi)星軌道距地面的高度約為36 000 km,是“天宮二號”空間實驗室軌道高度的90倍左右���,則( )
A.該衛(wèi)星的速率比“天宮二號”的大
B.該衛(wèi)星的周期比“天宮二號”的大
C.該衛(wèi)星的角速度比“天宮二號”的大
D.該衛(wèi)星的向心加速度比“天宮二號”的大
解析:選B 根據(jù)G=mrω2
16�、=mr=m=ma解得v=����,T=2π,ω=�����,a=�,因北斗衛(wèi)星的運轉(zhuǎn)半徑大于天宮二號的軌道半徑,可知該衛(wèi)星的速率比“天宮二號”的?�?�;該衛(wèi)星的周期比“天宮二號”的大����;該衛(wèi)星的角速度比“天宮二號”的小��;該衛(wèi)星的向心加速度比“天宮二號”的?���。还蔬x項B正確����,A、C�、D錯誤。
2.(2019·全國卷Ⅲ)從地面豎直向上拋出一物體���,物體在運動過程中除受到重力外�,還受到一大小不變��、方向始終與運動方向相反的外力作用����。距地面高度h在3 m以內(nèi)時,物體上升���、下落過程中動能Ek隨h的變化如圖所示�����。重力加速度取10 m/s2��。該物體的質(zhì)量為( )
A.2 kg B.1.5 kg
C.1 kg D.
17���、0.5 kg
解析:選C 畫出運動示意圖��,設(shè)阻力為f���,據(jù)動能定理知
A→B(上升過程):-(mg+f)h=EkB-EkA
C→D(下落過程):(mg-f)h=EkD-EkC
聯(lián)立解得物體的質(zhì)量m=1 kg,選項C正確���。
3.[多選](2019·全國卷Ⅱ)從地面豎直向上拋出一物體�����,其機械能E總等于動能Ek與重力勢能Ep之和���。取地面為重力勢能零點,該物體的E總和Ep隨它離開地面的高度h的變化如圖所示���。重力加速度取10 m/s2�����。由圖中數(shù)據(jù)可得( )
A.物體的質(zhì)量為2 kg
B.h=0時���,物體的速率為20 m/s
C.h=2 m時,物體的動能Ek=40 J
D.從地面至h=
18�、4 m,物體的動能減少100 J
解析:選AD 由于Ep=mgh����,所以Ep與h成正比,斜率k=mg�,由題給圖像得k=20 N,因此m=2 kg��,A對�����。當h=0時���,Ep=0����,E總=Ek=mv02,因此v0=10 m/s���,B錯��。由題給圖像知h=2 m時�,E總=90 J�,Ep=40 J,由E總=Ek+Ep得Ek=50 J�����,C錯����。h=4 m時,E總=Ep=80 J�,即此時Ek=0,即上升4 m距離����,動能減少100 J,D對���。
4.[多選](2019·海南高考)三個小物塊分別從3條不同光滑軌道的上端由靜止開始滑下����。已知軌道1�����、軌道2�、軌道3的上端距水平地面的高度均為4h0;它們的下端水平�,距地面的高
19、度分別為h1=h0�、h2=2h0、h3=3h0��,如圖所示���。若沿軌道1���、2、3下滑的小物塊的落地點到軌道下端的水平距離分別記為s1����、s2、s3,則( )
A.s1>s2 B.s2>s3
C.s1=s3 D.s2=s3
解析:選BC 對軌道1:小物塊射出時的速度v1==�,射程s1=v1=2h0;對軌道2:小物塊射出時的速度v2==�����,射程s2=v2=4h0����;對軌道3:小物塊射出時的速度v3=,射程s3=v3=2h0����;則s1=s3,s2>s3�����,故B����、C正確,A�、D錯誤。
5.[多選](2019·蘇北四市一模)2017年9月15日���,微信啟動“變臉”:由此前美國衛(wèi)星拍攝地球的靜態(tài)圖換成了我國
20�、“風(fēng)云四號”衛(wèi)星拍攝地球的動態(tài)圖,如圖所示��?���!帮L(fēng)云四號”是一顆靜止軌道衛(wèi)星����,關(guān)于“風(fēng)云四號”,下列說法正確的有( )
A.能全天候監(jiān)測同一地區(qū)
B.運行速度大于第一宇宙速度
C.在相同時間內(nèi)該衛(wèi)星與地心連線掃過的面積相等
D.向心加速度大于地球表面的重力加速度
解析:選AC 由于“風(fēng)云四號”是地球同步衛(wèi)星��,相對地面靜止�,故能全天候監(jiān)測同一地區(qū),A正確���;萬有引力提供向心力��,由G=m���,解得v=,而第一宇宙速度是近地衛(wèi)星的最大環(huán)繞速度����,故同步衛(wèi)星的速度小于第一宇宙速度�����,故B錯誤�;根據(jù)開普勒第二定律�����,在相同時間內(nèi)該衛(wèi)星與地心連線掃過的面積相等�,故C正確;向心加速度由萬有引力產(chǎn)生��,由G=ma
21����、,得a=�,而地球表面的重力加速度g=,故向心加速度小于地球表面的重力加速度���,故D錯誤�。
6.[多選](2019·如皋調(diào)研)我國“神舟”十一號載人飛船于2016年10月17日7時30分發(fā)射成功�����。飛船先沿橢圓軌道飛行,在接近400 km高空處與“天宮”二號對接��,然后做圓周運動�。兩名宇航員在空間實驗室生活、工作了30天���?!吧裰邸笔惶栞d人飛船于11月17日12時41分與“天宮”二號成功實施分離����,11月18日順利返回至著陸場�。下列判斷正確的是( )
A.飛船變軌前后的機械能守恒
B.對接后飛船在圓軌道上運動的速度小于第一宇宙速度
C.宇航員在空間實驗室內(nèi)可以利用跑步機跑步來鍛煉身體
D
22、.分離后飛船在原軌道上通過減速運動����,逐漸接近地球表面
解析:選BD 每次變軌都需要發(fā)動機對飛船做功,故飛船機械能不守恒���,故A錯誤���;根據(jù)萬有引力提供向心力G=m��,得v=�,軌道高度越大�����,線速度越小���,第一宇宙速度是近地衛(wèi)星的最大環(huán)繞速度����,故對接后飛船在圓軌道上運動的速度比第一宇宙速度小�����,故B正確����;利用跑步機跑步是由于重力作用,人與跑步機之間有壓力�����,又由于有相對運動���,人受到摩擦力作用運動起來���,在空間實驗室內(nèi)����,宇航員處于完全失重狀態(tài)���,無法利用跑步機跑步��,故C錯誤��;當飛船要離開圓形軌道返回地球時����,飛船做近心運動���,萬有引力需大于向心力,需要減小速度�,故D正確。
7.如圖所示�,在粗糙水平軌道OO1上的O點
23、靜止放置一質(zhì)量m=0.25 kg的小物塊��,它與水平軌道間的動摩擦因數(shù)μ=0.4,OO1的距離s=4 m���。在O1右側(cè)固定了一半徑R=0.32 m的光滑的豎直半圓弧���,現(xiàn)用F=2 N的水平恒力拉動小物塊,一段時間后撤去拉力�。g取10 m/s2,求:
(1)為使小物塊到達O1����,求拉力F作用的最短時間;
(2)若將拉力變?yōu)镕1��,使小物塊由O點靜止運動至OO1的中點位置撤去拉力����,恰能使小物塊經(jīng)過半圓弧的最高點,求F1的大小�����。
解析:(1)設(shè)拉力F作用的最短時間t內(nèi)�����,物塊運動的位移為x,由動能定理:Fx-μmgs=0
解得x=2 m
由牛頓第二定律:F-μmg=ma
解得a=4 m/s2
24��、由運動學(xué)公式:x=at2
解得t=1 s��。
(2)設(shè)小物塊到達O1點的速度為v1����,剛好到達最高點時的速度為v,
由牛頓第二定律:mg=m
由機械能守恒定律:mv12=2mgR+mv2
在水平軌道上運動���,應(yīng)用動能定理:F1-μmgs=mv12
解得F1=3 N��。
答案:(1)1 s (2)3 N
(三)電場����、電路和磁場
物理概念�、規(guī)律
公式
備注
靜電場
庫侖定律
F=k(k=9.0×109 N·m2/C2)
適用條件:真空中的點電荷
電場強度
E=
定義式,適用于任何電場的計算
E=k
只適用于真空中的點電荷產(chǎn)生的電場
E=
只適用于勻強電場
25��、電場力
F=qE
F與E的方向相同或相反
電勢��、電勢差
φ=
UAB=φA-φB=
電勢與零勢面的選取有關(guān)��,電勢差則與零勢面無關(guān)
電容器的電容
C=
定義式
C=
適用于平行板電容器
恒定電流
電阻定律
R=ρ
ρ為電阻率
電流
I==nqSv
-
電源電動勢
E==U內(nèi)+U外
歐姆定律
I=
部分電路歐姆定律
I=
閉合電路歐姆定律
路端電壓
U=E
斷路時
U=0
短路時
U=IR=E-U內(nèi)=E-Ir
通路時
電功
W=UIt
適用于一切電路
W=I2Rt=t
適用于純電阻電路
焦耳定律
Q=I2Rt
-
26����、
電源功率
P=EI
用電器功率
P==UI
適用于一切電路
P=I2R=
適用于純電阻電路
電源效率
η=×100%=×100%
磁場
磁感應(yīng)強度
B=
I與B的方向垂直
安培力
F=BIL
B⊥I,用左手定則判斷力的方向
洛倫茲力
F=Bqv
B⊥v��,用左手定則判斷力的方向
[保溫訓(xùn)練]
1.(2019·海南高考)如圖�,靜電場中的一條電場線上有M、N兩點�����,箭頭代表電場的方向�����,則( )
A.M點的電勢比N點的低
B.M點的場強大小一定比N點的大
C.電子在M點的電勢能比在N點的低
D.電子在M點受到的電場力大小一定比在N點的大
27�、
解析:選C 順著電場線電勢逐漸降低,可知M點的電勢比N點的高��,選項A錯誤����;一條電場線不能確定疏密,則不能比較MN兩點場強的大小����,也不能比較電子在MN兩點受電場力的大小�,選項B���、D錯誤�;負電荷在高電勢點的電勢能較低����,選項C正確。
2.(2019·天津高考)如圖所示�����,在水平向右的勻強電場中��,質(zhì)量為m的帶電小球�����,以初速度v從M點豎直向上運動����,通過N點時,速度大小為2v����,方向與電場方向相反,則小球從M運動到N的過程( )
A.動能增加mv2 B.機械能增加2mv2
C.重力勢能增加mv2 D.電勢能增加2mv2
解析:選B 小球動能增加量ΔEk=m(2v)2-mv2=mv2��,A錯
28��、�����。重力和電場力做功��,機械能增加量等于電勢能減少量���。帶電小球在水平方向做向左的勻加速直線運動����,由運動學(xué)公式得(2v)2-0=2x��,則電勢能減少量等于電場力做的功ΔEp電=W電=qEx=2mv2�,B對,D錯����。小球在豎直方向做勻減速到零的運動���,由-v2=-2gh,得重力勢能增加量ΔEp重=mgh=mv2���,C錯�。
3.(2019·北京高考)如圖所示�����,正方形區(qū)域內(nèi)存在垂直紙面的勻強磁場�。一帶電粒子垂直磁場邊界從a點射入,從b點射出��。下列說法正確的是( )
A.粒子帶正電
B.粒子在b點速率大于在a點速率
C.若僅減小磁感應(yīng)強度�����,則粒子可能從b點右側(cè)射出
D.若僅減小入射速率����,則粒子在磁場中運
29、動時間變短
解析:選C 由左手定則知����,粒子帶負電��,A錯��。由于洛倫茲力不做功�����,粒子速率不變,B錯�����。由R=�����, 若僅減小磁感應(yīng)強度B�,R變大����,則粒子可能從b點右側(cè)射出�,C對。由R=,若僅減小入射速率v, 則R變小,粒子在磁場中的偏轉(zhuǎn)角θ變大��。由t=T,T=知,運動時間變長��,D錯�。
4.(2019·浙江選考)電動機與小電珠串聯(lián)接入電路,電動機正常工作時�,小電珠的電阻為R1����,兩端電壓為U1����,流過的電流為I1�����;電動機的內(nèi)電阻為R2�,兩端電壓為U2�,流過的電流為I2���。則( )
A.I1
C.= D.<
解析:選D 由題意可知I1=I2,選項A錯誤����;因U2>I2R2,U1=I
30、1R1,則<,選項B�����、C錯誤,D正確�。
5.[多選](2019·海南高考)如圖����,虛線MN的右側(cè)有方向垂直于紙面向里的勻強磁場����,兩電荷量相同的粒子P����、Q從磁場邊界的M點先后射入磁場,在紙面內(nèi)運動�����。射入磁場時,P的速度vP垂直于磁場邊界�,Q的速度vQ與磁場邊界的夾角為45°。已知兩粒子均從N點射出磁場�����,且在磁場中運動的時間相同�����,不計重力���,則( )
A.P和Q的質(zhì)量之比為1∶2
B.P和Q的質(zhì)量之比為∶1
C.P和Q速度大小之比為∶1
D.P和Q速度大小之比為2∶1
解析:選AC 設(shè)MN=2R��,則對粒子P的半徑為R���,有:R=;對粒子Q的半徑為R����,有:R=;又兩粒子的運動時間相同�,則tP
31����、=TP=����,tQ=TQ=�,即=,解得mQ=2mP�����,vP=vQ��,故A��、C正確��,B���、D錯誤�����。
6.質(zhì)譜儀是測帶電粒子質(zhì)量和分析同位素的一種儀器����,它的工作原理是帶電粒子(不計重力)經(jīng)同一電場加速后,垂直進入同一勻強磁場做圓周運動�,然后利用相關(guān)規(guī)律計算出帶電粒子質(zhì)量。其工作原理如圖所示�����。虛線為某粒子運動軌跡���,由圖可知( )
A.此粒子帶負電
B.下極板S2比上極板S1電勢高
C.若只減小加速電壓U���,則半徑r變大
D.若只減小入射粒子的質(zhì)量,則半徑r變小
解析:選D 粒子進入磁場后向左偏�,根據(jù)左手定則可知粒子帶正電,粒子經(jīng)過電場要加速�����,所以下極板S2比上極板S1電勢低����,A、B錯誤�;根據(jù)動能定
32、理得qU=mv2,由qvB=m得r= �,若只減小加速電壓U,r變小�����,若只減小入射粒子的質(zhì)量�����,則r變小���,故C錯誤,D正確���。
7.如圖所示����,在豎直平面內(nèi)的xOy直角坐標系中��,MN與水平x軸平行�,在MN與x軸之間有豎直向上的勻強電場和垂直坐標平面水平向里的勻強磁場,電場強度E=2 N/C�,磁感應(yīng)強度B=1 T,從y軸上的P點沿x軸方向以初速度v0=1 m/s水平拋出一帶正電的小球�����,小球的質(zhì)量為m=2×10-6 kg,電荷量q=1×10-5 C�����,g取10 m/s2����。已知P點到O點的距離為d0=0.15 m,MN到x軸的距離為d=0.20 m��。(π=3.14����,=1.414,=1.732���,結(jié)果保留兩位有
33�、效數(shù)字)
(1)求小球從P點運動至MN邊界所用的時間��;
(2)當小球運動到x軸時撤去電場��,求小球到達MN邊界時的速度大小。
解析:(1)小球從P點運動到x軸上�,做平拋運動,設(shè)小球做平拋運動的時間為t1��,進入磁場的速度為v�����,進入磁場時速度與x軸的夾角為θ��,則
d0=gt12�����,解得t1== s
v=�����, cos θ=
解得v=2 m/s, θ=60°
小球進入電磁場區(qū)域時����,
qE=2×10-5 N=mg
故小球作勻速圓周運動�,設(shè)軌跡半徑為r,則
qvB=m
解得r==0.4 m
由幾何關(guān)系��,小球運動到MN時軌跡與MN相切,在電磁場中運動的時間t2=×= s
小球從P點運動到
34����、MN所用時間t=t1+t2=0.38 s。
(2)設(shè)撤去電場后小球受重力和洛倫茲力作用��,由于洛倫茲力不做功�����,設(shè)小球運動至MN時速度大小為v1�����,由動能定理:
mgd=mv12-mv2
代入數(shù)據(jù)解得v1=2.8 m/s�。
答案:(1)0.38 s (2)2.8 m/s
(四)電磁感應(yīng)、交變電流和傳感器
物理概念����、規(guī)律
公式
備注
電磁感應(yīng)
磁通量
Φ=BScos θ
Scos θ為垂直于磁場B的方向的投影面積
動感應(yīng)電勢
E=n E=BLv
后者僅適用于B、L���、v兩兩垂直的情況
交變電流
電動勢��、電流��、電壓的瞬時值
電動勢:e=Emsin ωt
電流:i
35��、=Imsin ωt
電壓:u=Umsin ωt
從中性面開始計時
電動勢��、電流�����、電壓的有效值
電動勢:E=Em
電流:I=Im
電壓:U=Um
適用于正弦式交變電流
理想變壓器
=?����。?
P1=P2
—
傳感器
霍爾電壓
UH=k
k為霍爾系數(shù)����,大小與霍爾元件的材料有關(guān)
[保溫訓(xùn)練]
1.[多選](2019·全國卷Ⅰ)空間存在一方向與紙面垂直���、大小隨時間變化的勻強磁場�����,其邊界如圖(a)中虛線MN所示��。一硬質(zhì)細導(dǎo)線的電阻率為ρ�、橫截面積為S,將該導(dǎo)線做成半徑為r的圓環(huán)固定在紙面內(nèi)�����,圓心O在MN上��。t=0時磁感應(yīng)強度的方向如圖(a)所示�����;磁感應(yīng)強度B隨時間t的
36�、變化關(guān)系如圖(b)所示。則在t=0到t=t1的時間間隔內(nèi)( )
圖(a) 圖(b)
A.圓環(huán)所受安培力的方向始終不變
B.圓環(huán)中的感應(yīng)電流始終沿順時針方向
C.圓環(huán)中的感應(yīng)電流大小為
D.圓環(huán)中的感應(yīng)電動勢大小為
解析:選BC 由于通過圓環(huán)的磁通量均勻變化�����,故圓環(huán)中產(chǎn)生的感應(yīng)電動勢���、感應(yīng)電流的大小和方向不變�,但t0時刻磁場方向發(fā)生變化����,故安培力方向發(fā)生變化,A錯���。根據(jù)楞次定律����,圓環(huán)中感應(yīng)電流的方向始終沿順時針方向,B對����。根據(jù)法拉第電磁感應(yīng)定律,感應(yīng)電動勢E=·S′=·=����,根據(jù)閉合電路歐姆定律知,電流I===���,C對,D錯
37�、。
2.如圖所示�,固定平行導(dǎo)軌間有磁感應(yīng)強度大小為B、方向垂直導(dǎo)軌平面向里的勻強磁場����,導(dǎo)軌間距為l且足夠長,左端接阻值為R的定值電阻����,導(dǎo)軌電阻不計?��,F(xiàn)有一長為2l的金屬棒垂直放在導(dǎo)軌上,在金屬棒以O(shè)點為軸沿順時針方向以角速度ω轉(zhuǎn)過60°的過程中(金屬棒始終與導(dǎo)軌接觸良好����,電阻不計)( )
A.通過定值電阻的電流方向由b到a
B.金屬棒剛開始轉(zhuǎn)動時,產(chǎn)生的感應(yīng)電動勢最大
C.通過定值電阻的最大電流為
D.通過定值電阻的電荷量為
解析:選D 金屬棒以O(shè)點為軸沿順時針方向轉(zhuǎn)動�����,由右手定則可知��,通過定值電阻的電流方向由a到b����,故A錯誤;當金屬棒轉(zhuǎn)過60°時有效的切割長度最大����,產(chǎn)生的感應(yīng)電
38、動勢最大��,感應(yīng)電流最大����。感應(yīng)電動勢最大值為:Em=B·2l=B·2l·=2Bl2ω���,通過定值電阻的最大電流為:Im==,故B�����、C錯誤���。通過定值電阻的電荷量為:q=Δt��,平均感應(yīng)電流為:=�����,平均感應(yīng)電動勢為:=�,ΔΦ=B·l·l=Bl2���,解得:q=,故D正確����。
3.[多選]如圖所示電路中�,P為發(fā)光氖泡����,發(fā)光電壓U>60 V,L為自感系數(shù)很大����、電阻不為零的電感線圈,直流電源電動勢E=6 V����。接通開關(guān)S,氖泡不亮�����;穩(wěn)定時�����,L中電流恒定為I0����;斷開S時,氖泡能短時間內(nèi)發(fā)光。關(guān)于該現(xiàn)象��,下列說法正確的有( )
A.S接通瞬間�,L中電流是逐漸增加的
B.S接通穩(wěn)定時,P兩端電壓為零
C.S斷
39�����、開瞬間��,氖泡P發(fā)光時電流最大值可能超過I0
D.S斷開瞬間��,氖泡P發(fā)光時電流從右向左
解析:選AD S接通瞬間�����,線圈L中的電流從無到有發(fā)生變化��,線圈L中產(chǎn)生的自感電動勢對電流的增大有阻礙作用�����,所以通過線圈L的電流慢慢變大���,故選項A正確���;S接通穩(wěn)定時,由于電感線圈的電阻不為零�����,電感線圈兩端電壓不為零����,所以發(fā)光氖泡兩端電壓不為零,故選項B錯誤�;S斷開瞬間前,線圈L中電流恒定為I0���,S斷開瞬間�,線圈L由于自感現(xiàn)象會產(chǎn)生與線圈中原電流方向相同的感應(yīng)電動勢�,使線圈中的電流將從原來的I0逐漸減小,方向不變�����,且由于它和氖泡P構(gòu)成回路�����,通過氖泡P的電流和線圈L中的電流大小相同,也從I0逐漸減小��,通過氖泡P
40����、的電流從右向左,故選項D正確����,C錯誤。
4.如圖所示��,一個匝數(shù)為N=100匝�����,電阻不計的線框以固定轉(zhuǎn)速50 r/s在勻強磁場中旋轉(zhuǎn)��,其產(chǎn)生的交流電通過一匝數(shù)比為n1∶n2=10∶1的理想變壓器給阻值R=20 Ω的電阻供電����,已知電壓表的示數(shù)為20 V,從圖示位置開始計時�,下列說法正確的是( )
A.t=0時刻線框內(nèi)的電流最大
B.變壓器原線圈中電流的有效值為10 A
C.穿過線框平面的最大磁通量為 Wb
D.理想變壓器的輸入功率為10 W
解析:選C t=0時刻導(dǎo)線框處于中性面位置,則感應(yīng)電動勢為零�,感應(yīng)電流為零���,所以流過線框的電流為零,故A錯誤��;副線圈中的電流I2== A=1 A
41����、���,根據(jù)電流與匝數(shù)成反比��,=�,原線圈中電流的有效值I1=I2=×1 A=0.1 A�����,故B錯誤�����;根據(jù)電壓與匝數(shù)成正比����,原線圈兩端的電壓U1=200 V����,角速度ω=2πn=100π rad/s�����,線圈產(chǎn)生最大感應(yīng)電動勢Em=200 V�,又Em=NBSω,所以最大磁通量Φ=BS== Wb= Wb����,故C正確;理想變壓器輸出功率P2=U2I2=20×1 W=20 W��,輸入功率等于輸出功率���,所以變壓器的輸入功率為20 W��,故D錯誤�����。
5.如圖甲所示��,足夠長的光滑平行金屬導(dǎo)軌MN�����、PQ組成的平面與水平面成θ=37°角放置��,導(dǎo)軌寬度L=1 m�,一勻強磁場垂直導(dǎo)軌平面向下,導(dǎo)軌上端M與P之間連接阻值R=0.3 Ω
42��、的電阻��,質(zhì)量為m=0.4 kg�����、電阻r=0.1 Ω的金屬棒ab始終緊貼在導(dǎo)軌上?�,F(xiàn)使金屬導(dǎo)軌ab由靜止開始下滑�,下滑過程中ab始終保持水平��,且與導(dǎo)軌接觸良好���,其下滑距離x與時間t的關(guān)系如圖乙所示�,圖像中的OA段為曲線����,AB段為直線����,導(dǎo)軌電阻不計�。g取10 m/s2,sin 37°=0.6�����,忽略ab棒在運動過程中對原磁場的影響����。求:
(1)磁感應(yīng)強度B的大小��;
(2)在金屬棒ab開始運動的2.0 s內(nèi)��,通過電阻R的電荷量�;
(3)在金屬棒ab開始運動的2.0 s內(nèi),電阻R產(chǎn)生的焦耳熱�����。
解析:(1)當金屬棒沿斜面方向的重力分力與安培力平衡時��,即AB段,金屬棒做勻速運動���,此時
mgs
43����、in θ=BIL
金屬棒切割磁感線產(chǎn)生的電動勢為
E=BLv
由閉合電路歐姆定律知:
I=
金屬棒勻速運動時����,v== m/s=6 m/s
聯(lián)立以上各式,代入數(shù)據(jù)解得:B=0.4 T�。
(2)q=t=t=t===6 C��。
(3)設(shè)在金屬棒開始運動的2 s內(nèi)��,系統(tǒng)產(chǎn)生的熱量為Q���,
由功能關(guān)系得:mgxsin θ=mv2+Q
電阻R產(chǎn)生的焦耳熱為QR=R
聯(lián)立以上兩式解得QR=5.4 J��。
答案:(1)0.4 T (2)6 C (3)5.4 J
6.如圖甲所示�,在豎直方向上有四條間距相等的水平虛線L1���、L2�����、L3����、L4,在L1�����、L2之間和L3�、L4之間均存在勻強磁場,磁感應(yīng)
44�����、強度B大小均為1 T�,方向垂直于虛線所在的平面向里。現(xiàn)有一矩形線圈abcd�,cd寬度L=0.5 m,質(zhì)量為0.1 kg����,電阻為2 Ω,將其從圖示位置由靜止釋放(cd邊與L1重合),速度隨時間的變化關(guān)系如圖乙所示��,t1時刻cd邊與 L2重合�,t2時刻ab邊與L3重合,t3時刻ab邊與L4重合����,已知t1~t2的時間間隔為0.6 s,整個運動過程中線圈平面始終處于豎直方向����,重力加速度g取10 m/s2。求:
(1)線圈的長度���;
(2)在0~t1時間內(nèi)����,通過線圈的電荷量�;
(3)0~t3時間內(nèi)��,線圈產(chǎn)生的熱量�。
解析:(1)在t2~t3時間內(nèi),線圈做勻速直線運動��,
根據(jù)平衡條件有:mg=
45、BIL�,而I=
解得:v2==8 m/s
t1~t2的時間間隔內(nèi)線圈一直做勻加速直線運動,可知ab邊剛進上邊的磁場時�,cd邊也剛進下邊的磁場,此段時間內(nèi)線圈內(nèi)磁通量不變��,線圈的加速度為g
設(shè)磁場的寬度為d��,則線圈的長度:L′=2d
線圈下降的位移為:x=L′+d=3d
此段時間內(nèi)的逆運動為初速度為v2���、加速度為g的勻減速直線運動����,
則有:3d=v2t-gt2
解得:d=1 m
所以線圈的長度為L′=2d=2 m��。
(2)在0~t1時間內(nèi)����,cd邊從L1運動到L2
通過線圈的電荷量為:
q=t′=t′==0.25 C。
(3)0~t3時間內(nèi)�,根據(jù)能量守恒得:
Q=mg(3
46、d+2d)-mv22
=0.1×10×(3+2) J-×0.1×82 J=1.8 J�。
答案:(1)2 m (2)0.25 C (3)1.8 J
二 必憶模型和規(guī)律——快速破題“往上套”
(一)水平面內(nèi)的圓周運動模型
圖示或釋義
規(guī)律或方法
線模型
由于細線對物體只有拉力且細線會彎曲,所以解答此類問題的突破口是要抓住“細線剛好伸直”的臨界條件:細線的拉力為零���。在此基礎(chǔ)上����,再考慮細線伸直之前的情況(一般物體做圓周運動的半徑和細線與轉(zhuǎn)軸之間的夾角都會發(fā)生變化)和伸直之后的情況(物體做圓周運動的半徑和細線與轉(zhuǎn)軸之間的夾角一般不再發(fā)生變化,但細線的拉力通常會發(fā)生變化)
彈力模型
47�����、
此類問題一般是由重力和彈力的合力提供物體在水平面內(nèi)做圓周運動的向心力���,因此正確找出做圓周運動的物體在水平方向上受到的合力�����,是解決此類問題的關(guān)鍵
摩擦力模型
臨界條件是關(guān)鍵:找出物體在圓周運動過程中的臨界條件���,是解答此類問題的關(guān)鍵。如輕繩開始有拉力(或伸直)�����、物體開始滑動等���,抓住這些臨界條件進行分析,即可找出極值,然后可根據(jù)極值判斷其他物理量與極值之間的關(guān)系�����,從而進行求解
(二)連接體模型
圖示或釋義
規(guī)律或方法
輕繩連接體模型
求解“繩+物”或“桿+物”模型的方法
先明確物體的合速度(物體的實際運動速度)���,然后將物體的合速度沿繩(桿)方向及垂直繩(桿)方向分
48�����、解(要防止與力的分解混淆)��,利用沿繩(桿)方向的分速度大小總是相等的特點列式求解
輕桿連接體模型
(三)斜面模型
圖示或釋義
與斜面相關(guān)的滑塊運動問題
規(guī)律或方法
(1)μ=tan θ�����,滑塊恰好處于靜止狀態(tài)(v0=0)或勻速下滑狀態(tài)(v0≠0)���,此時若在滑塊上加一豎直向下的力或加一物體,滑塊的運動狀態(tài)不變
(2)μ>tan θ�����,滑塊一定處于靜止狀態(tài)(v0=0)或勻減速下滑狀態(tài)(v0≠0)�����,此時若在滑塊上加一豎直向下的力或加一物體,滑塊的運動狀態(tài)不變(加力時加速度變大����,加物體時加速度不變)
(3)μ
49、���,滑塊的運動狀態(tài)不變(加力時加速度變大��,加物體時加速度不變)
(4)若滑塊處于靜止或勻速下滑狀態(tài)�����,可用整體法求出地面對斜面體的支持力為(M+m)g��,地面對斜面體的摩擦力為0��;若滑塊處于勻變速運動狀態(tài)��,可用牛頓第二定律求出�,地面對斜面體的支持力為(M+m)g-masin θ�,地面對斜面體的摩擦力為macos θ;不論滑塊處于什么狀態(tài)�,均可隔離滑塊,利用滑塊的運動狀態(tài)求斜面對滑塊的彈力��、摩擦力及作用力
(5)μ=0�,滑塊做勻變速直線運動,其加速度為a=gsin θ
(四)彈簧模型
圖示或釋義
規(guī)律或方法
與彈簧相關(guān)的平衡問題
彈簧類平衡問題常常以單一問題出現(xiàn)����,涉及的知識主要是
50、胡克定律���、物體的平衡條件���,求解時要注意彈力的大小與方向總是與彈簧的形變相對應(yīng),因此審題時應(yīng)從彈簧的形變分析入手��,找出形變量x與物體空間位置變化的對應(yīng)關(guān)系�,分析形變所對應(yīng)的彈力大小、方向��,結(jié)合物體受其他力的情況來列式求解
與彈簧相關(guān)的動力學(xué)問題
(1)彈簧(或橡皮筋)恢復(fù)形變需要時間���,在瞬時問題中����,其彈力的大小往往可以看成不變,即彈力不能突變�����。而細線(或接觸面)是一種不發(fā)生明顯形變就能產(chǎn)生彈力的物體���,若剪斷(或脫離)后����,其中彈力立即消失�����,即彈力可突變����,一般題目中所給細線和接觸面在沒有特殊說明時,均可按此模型處理
(2)對于連接體的加速問題往往先使用整體法求得其加速度����,再用隔離法求得受力
51�、少的物體的加速度��,并利用加速度的關(guān)系求解相應(yīng)量
與彈簧相關(guān)的功能問題
彈簧連接體是考查功能關(guān)系問題的經(jīng)典模型���,求解這類問題的關(guān)鍵是認真分析系統(tǒng)的物理過程和功能轉(zhuǎn)化情況,再由動能定理�����、機械能守恒定律或功能關(guān)系列式��,同時注意以下兩點:①彈簧的彈性勢能與彈簧的規(guī)格和形變程度有關(guān)���,對同一根彈簧而言�,無論是處于伸長狀態(tài)還是壓縮狀態(tài)��,只要形變量相同,則其儲存的彈性勢能就相同��;②彈性勢能公式Ep=kx2在高考中不作要求(除非題中給出該公式)�����,與彈簧相關(guān)的功能問題一般利用動能定理或能量守恒定律求解
(五)桿+導(dǎo)軌模型
圖示或釋義
規(guī)律或方法
桿cd以一定初速度v在光滑水平軌道上滑動���,質(zhì)量為
52、m���,電阻不計�����,兩導(dǎo)軌間距為L
桿以速度v切割磁感線��,產(chǎn)生感應(yīng)電動勢E=BLv��,電流I=�,安培力F=BIL=�。桿做減速運動:v↓?F↓?a↓,當v=0時�����,a=0,桿保持靜止���,動能全部轉(zhuǎn)化為內(nèi)能:Q=mv2
軌道水平光滑���,桿cd質(zhì)量為m,電阻不計�,兩導(dǎo)軌間距為L��,拉力F恒定
開始時a=���,桿cd速度v↑?感應(yīng)電動勢E=BLv↑?I↑?安培力F安=BIL↑����,由F-F安=ma知a↓���,當a=0時��,v最大�,vm=
拉力F做的功一部分轉(zhuǎn)化為桿cd的動能�����,一部分轉(zhuǎn)化為內(nèi)能:WF=Q+mvm2
傾斜軌道光滑,傾角為α����,桿cd質(zhì)量為m,兩導(dǎo)軌間距為L
開始時a=gsin
53�、α,桿cd速度v↑?感應(yīng)電動勢E=BLv↑?I↑?安培力F安=BIL↑���,由mgsin α-F安=ma知a↓���,當a=0時,v最大�,vm=
重力做的功(或減少的重力勢能)一部分轉(zhuǎn)化為桿cd的動能,一部分轉(zhuǎn)化為內(nèi)能:WG=Q+mvm2
豎直軌道光滑����,桿cd質(zhì)量為m,兩導(dǎo)軌間距為L
開始時a=g���,桿cd速度v↑?感應(yīng)電動勢E=BLv↑?I↑?安培力F安=BIL↑�,由mg-F安=ma知a↓����,當a=0時����,v最大�����,vm=
重力做的功(或減少的重力勢能)一部分轉(zhuǎn)化為桿cd的動能�����,一部分轉(zhuǎn)化為內(nèi)能:WG=Q+mvm2
(六)線圈模型
圖示或釋義
規(guī)律或方法
靜止線圈模型線圈不動�����,磁
54����、感應(yīng)強度大小隨時間變化
(1)用法拉第電磁感應(yīng)定律和楞次定律判斷感應(yīng)電動勢的大小和方向
(2)由閉合電路歐姆定律確定回路中的感應(yīng)電流
(3)分析研究導(dǎo)體的受力情況(包含安培力�����,用左手定則確定其方向)
(4)列動力學(xué)方程或平衡方程求解
平動線圈模型
(1)分析線圈運動情況�,判斷運動過程中是否有磁通量不變的階段�。線圈穿過磁場��,有感應(yīng)電流產(chǎn)生時��,整個線圈形成閉合電路��。根據(jù)電路分析��,由閉合電路歐姆定律列方程
(2)對某一狀態(tài)�����,分析線圈的受力情況����,由牛頓第二定律列式:
F外+F安=ma
(3)線圈穿過磁場時,外力克服安培力做功����,將其他形式的能轉(zhuǎn)化為電能,電流通過電阻時�����,電流做功使電
55�����、能轉(zhuǎn)化為內(nèi)能,再由動能定理W外-W安=Ek2-Ek1或能量守恒定律列式
轉(zhuǎn)動線圈模型
(1)線框勻速轉(zhuǎn)動產(chǎn)生感應(yīng)電動勢����,可根據(jù)E=nBSω求出感應(yīng)電動勢的最大值,進而求出感應(yīng)電動勢的有效值��,再求其他值
(2)一般計算電功�����、電功率�、電熱等與熱效應(yīng)有關(guān)的量必須用有效值;電壓表��、電流表所能測量到的也是有效值
(3)可根據(jù)=n求出感應(yīng)電動勢的平均值���,求出平均感應(yīng)電流后再求電荷量
[保溫訓(xùn)練]
1.[多選]如圖所示,在水平圓盤上沿半徑方向放置兩個可視為質(zhì)點的�、完全相同的木塊A和B,兩木塊用細繩相連����,木塊與圓盤之間的最大靜摩擦力均為其自身重力的k倍��,木塊A��、B距圓盤中心O點的距離分別為
56�、rA=R����、rB=2R。開始時�,細繩恰好伸直但無拉力。已知重力加速度為g�����,現(xiàn)讓該裝置繞通過圓盤中心的豎直軸從靜止開始轉(zhuǎn)動�����,使其角速度從0開始逐漸增大�,則在此過程中,以下說法正確的是( )
A.在木塊A開始相對圓盤滑動之前�����,其受到的靜摩擦力始終指向圓心
B.當圓盤運動的角速度ω> 時��,細繩一定有彈力
C.當圓盤轉(zhuǎn)動的角速度ω> 時,木塊A����、B將相對于圓盤發(fā)生滑動
D.當圓盤轉(zhuǎn)動的角速度ω在 <ω< 范圍內(nèi)增大時,木塊A所受到的靜摩擦力一直在減小
解析:選BC 由于木塊A���、B均相對于圓盤靜止�,所以兩木塊具有共同的角速度�,在細繩沒有拉力時,兩木塊均由靜摩擦力提供做圓周運動的向心力��,故木塊A
57����、受到的靜摩擦力方向指向圓心。隨著角速度的增大����,細繩開始有拉力,由向心力公式F=mω2r可知��,木塊B需要的向心力是木塊A的兩倍���,故最終木塊B將相對于圓盤向外滑動��,木塊A將相對于圓盤向圓心滑動���,此時木塊A受到的摩擦力方向背離圓心,選項A錯誤�����;當細繩剛好有拉力時��,對木塊B有:kmg=mω2rB����,解得:ω= ,故當ω> 時����,細繩一定有彈力,選項B正確���;當木塊A�、B將要相對于圓盤發(fā)生滑動時��,設(shè)此時細繩的拉力為FT,則由牛頓第二定律可知���,對木塊A有:FT-kmg=mω2rA����,對木塊B有:FT+kmg=mω2rB�����,代入數(shù)據(jù)聯(lián)立求解可得:ω= ����,故當ω> 時,木塊A���、B將相對于圓盤發(fā)生滑動�,選項C正確�;由
58、題意可知��,當角速度ω= 時�,木塊A受到指向圓心的靜摩擦力,而當ω=時�����,木塊A受到背離圓心的最大靜摩擦力,故當圓盤轉(zhuǎn)動的角速度ω在 <ω< 范圍內(nèi)增大時����,木塊A所受到的靜摩擦力先減小后增大�,選項D錯誤。
2.如圖所示���,三角形ABC是固定在水平面上的三棱柱的橫截面���,∠A=30°,∠B=37°�����,C處有光滑小滑輪�,質(zhì)量分別為m1、m2的兩物塊1����、2通過細線跨放在AC面和BC面上,且均恰好處于靜止狀態(tài)���,已知AC面光滑���,物塊2與BC面間的動摩擦因數(shù)μ=0.5��,最大靜摩擦力等于滑動摩擦力�,則兩物塊的質(zhì)量比m1∶m2不可能是(sin 37°=0.6, cos 37°=0.8)( )
A.1∶3
59����、B.3∶5
C.5∶3 D.2∶1
解析:選A 物塊1受重力m1g、細線拉力FT和斜面支持力FN作用處于平衡狀態(tài)��,則FT=m1gsin 30°�,物塊2受重力m2g、細線拉力FT��、斜面支持力FN′及摩擦力Ff作用處于平衡狀態(tài)�����,當m1較大時�,物塊2所受最大靜摩擦力方向沿斜面向下,此時有FT=m2gsin 37°+μm2gcos 37°�,則=2;當m1較小時��,物塊2所受最大靜摩擦力方向沿斜面向上,此時有FT=m2gsin 37°-μm2gcos 37°�,則=,所以≤≤2��,故A不可能�。
3.[多選]如圖所示,半徑為R=0.4 m的圓形光滑軌道固定在豎直平面內(nèi)����,圓形軌道與固定的光滑水平軌道相切�。可
60�、視為質(zhì)點的質(zhì)量均為m=0.5 kg的小球甲、乙用輕桿連接��,置于圓軌道上���,小球甲與圓心O點等高����,小球乙位于圓心O的正下方�。某時刻將兩小球由靜止釋放,最終它們在水平面上運動�����,g取10 m/s2。則( )
A.兩小球最終在水平面上運動的速度大小為2 m/s
B.甲小球下滑到圓形軌道最低點時重力的功率為10 W
C.甲小球下滑到圓形軌道最低點時對軌道壓力的大小為5 N
D.整個過程中輕桿對乙小球做的功為1 J
解析:選AD 整個過程中��,甲����、乙兩球組成的系統(tǒng)機械能守恒,最后兩球的速度大小相等���,應(yīng)用機械能守恒定律:mgR=2×mv2��,解得v=2 m/s�,選項A正確�����;甲小球下滑到最低點時速度水平
61�、,重力的功率為0�,選項B錯誤;甲小球下滑到最低點時��,重力與支持力的合力提供向心力FN-mg=m����,解得FN=2mg=10 N���,由牛頓第三定律得,甲小球下滑到最低點時對軌道壓力的大小為10 N�,選項C錯誤;整個過程中對乙小球受力分析可知���,重力不做功��,乙小球動能的增量等于輕桿對乙球做的功,W=mv2=1 J���,選項D正確�����。
4.如圖所示�����,在水平地面上靜止著一質(zhì)量為M��、傾角為θ的斜面體���,自由釋放的質(zhì)量為m的滑塊能在斜面上勻速下滑(斜面體始終靜止)��,則下列說法中正確的是( )
A.滑塊對斜面的作用力大小等于mgcos θ��,方向垂直斜面向下
B.斜面對滑塊的作用力大小等于mg�,方向豎直向上
C.斜
62�、面體受到地面的摩擦力水平向左,大小與m的大小有關(guān)
D.滑塊能勻速下滑����,則水平地面不可能是光滑的
解析:選B 因滑塊在重力、斜面的摩擦力及斜面的支持力作用下勻速下滑��,如圖所示���,所以斜面對滑塊的作用力大小等于mg��,方向豎直向上�,B項正確�;而滑塊對斜面的作用力與斜面對滑塊的作用力是一對作用力與反作用力,A項錯誤����;又因斜面體及滑塊均處于平衡狀態(tài)���,所以可將兩者看成一整體,則整體在豎直方向受重力和地面的支持力作用��,水平方向不受力的作用��,即水平地面對斜面體沒有摩擦力作用�����,C����、D項錯誤。
5.[多選]如圖所示����,ABCD為固定的水平光滑矩形金屬導(dǎo)軌����,處在方向豎直向下、磁感應(yīng)強度為B的勻強磁場中�����,A、B間距
63��、為L�����,左右兩端均接有阻值為R的電阻��,質(zhì)量為m����、長為L且不計電阻的導(dǎo)體棒MN放在導(dǎo)軌上,與導(dǎo)軌接觸良好�,與左端固定在O點的輕質(zhì)彈簧連接組成彈簧振子。開始時�,彈簧處于自然長度,導(dǎo)體棒MN具有水平向左的初速度v0���,經(jīng)過一段時間����,導(dǎo)體棒MN第一次運動到最右端�,這一過程中A、B間的電阻R上產(chǎn)生的焦耳熱為Q,已知運動過程中MN始終與AD����、BC垂直,則( )
A.初始時刻導(dǎo)體棒所受的安培力大小為
B.當導(dǎo)體棒第一次到達最右端時����,彈簧具有的彈性勢能為 mv02-Q
C.當導(dǎo)體棒第一次到達最右端時,彈簧具有的彈性勢能為 mv02-2Q
D.當導(dǎo)體棒第二次回到初始位置時���,A��、B間電阻的熱功率為
解析
64����、:選AC 由F=BIL及I=�,得安培力大小為FA=,故A正確��;導(dǎo)體棒第一次運動至最右端的過程中�,AB間電阻R上產(chǎn)生的焦耳熱為Q���,回路中產(chǎn)生的總焦耳熱為2Q�,由能量守恒定律得mv02=2Q+Ep,此時彈簧的彈性勢能為Ep=mv02-2Q����,故C正確,B錯誤���;當導(dǎo)體棒第二次回到初始位置時����,由于機械能減小�����,A��、B間電阻的熱功率小于���,故D錯誤��。
6.如圖甲所示��,一對足夠長的平行光滑軌道固定在水平面上�����,兩軌道間距l(xiāng)=0.5 m��,左側(cè)接一阻值為R=1 Ω的電阻��。有一金屬棒靜止地放在軌道上���,與兩軌道垂直�,金屬棒及軌道的電阻皆可忽略不計�,整個裝置處于垂直軌道平面豎直向下的勻強磁場中。t=0時����,用一外力F沿軌道
65、方向拉金屬棒��,使金屬棒以加速度a=0.2 m/s2做勻加速運動����,外力F與時間t的關(guān)系如圖乙所示。
(1)求金屬棒的質(zhì)量m�;
(2)求磁感應(yīng)強度B的大小��;
(3)當力F達到某一值時���,保持F不再變化��,金屬棒繼續(xù)運動3 s�����,速度達到1.6 m/s且不再變化����,測得在這3 s內(nèi)金屬棒的位移s=4.7 m����,求這段時間內(nèi)電阻R消耗的電能。
解析:由題圖乙知F=0.1+0.05t(N)
(1)金屬棒沿軌道向右運動����,產(chǎn)生的感應(yīng)電動勢E=Blv,回路中的感應(yīng)電流I=�,
所以金屬棒受到的安培力F安=BIl=,
由牛頓第二定律得F-F安=(0.1+0.05t)-=ma�,
考慮t=0時,v=at=0
66�����、
所以m== kg=0.5 kg。
(2)金屬棒做勻加速運動��,所以金屬棒所受合力
F合=(0.1+0.05t)-=0.1+t=常數(shù)�,
所以0.05-=0,
解得:B== T=1 T���。
(3)F變?yōu)楹懔?���,金屬棒做加速度逐漸減小的變加速運動����,經(jīng)過3 s,速度達到最大vm=1.6 m/s�����,此后金屬棒做勻速運動��。
vm=1.6 m/s時�����,F(xiàn)合=0
F=F安== N=0.4 N��,
將F=0.4 N代入F=0.1+0.05t,求出變加速運動的起始時間為t=6 s�,
該時刻金屬棒的速度為v6=at=0.2×6 m/s=1.2 m/s;
由能量守恒�,可得這段時間內(nèi)電阻R消耗的電能:
E=WF-ΔEk=Fs-m(vm2-v62)=0.4×4.7 J-×0.5×(1.62-1.22)J=1.6 J��。
答案:(1)0.5 kg (2)1 T (3)1.6 J
7.用質(zhì)量為m�、總電阻為R的導(dǎo)線做成邊長為l的正方形線框MNPQ,并將其放在光滑的平行絕緣的傾斜軌道上��,軌道的傾角為θ�,平行導(dǎo)軌的間距也為l,如圖所示�。在導(dǎo)軌的下端有一寬度為l(即ab=l)、磁感應(yīng)強度為B的有界勻強磁場�,
 (江蘇專用)2020高考物理二輪復(fù)習(xí) 第二部分 考前調(diào)節(jié) 激發(fā)狀態(tài) 方法 規(guī)律 通曉高考4大解題策略教學(xué)案
(江蘇專用)2020高考物理二輪復(fù)習(xí) 第二部分 考前調(diào)節(jié) 激發(fā)狀態(tài) 方法 規(guī)律 通曉高考4大解題策略教學(xué)案