《高考物理大一輪復(fù)習(xí) 第10章 電磁感應(yīng) 第4節(jié) 微專題4 電磁感應(yīng)中的“桿 導(dǎo)軌”模型課時(shí)規(guī)范訓(xùn)練》由會(huì)員分享��,可在線閱讀��,更多相關(guān)《高考物理大一輪復(fù)習(xí) 第10章 電磁感應(yīng) 第4節(jié) 微專題4 電磁感應(yīng)中的“桿 導(dǎo)軌”模型課時(shí)規(guī)范訓(xùn)練(8頁(yè)珍藏版)》請(qǐng)?jiān)谘b配圖網(wǎng)上搜索��。
1��、
第4節(jié) 微專題4 電磁感應(yīng)中的“桿 導(dǎo)軌”模型
課時(shí)規(guī)范訓(xùn)練
[基礎(chǔ)鞏固題組]
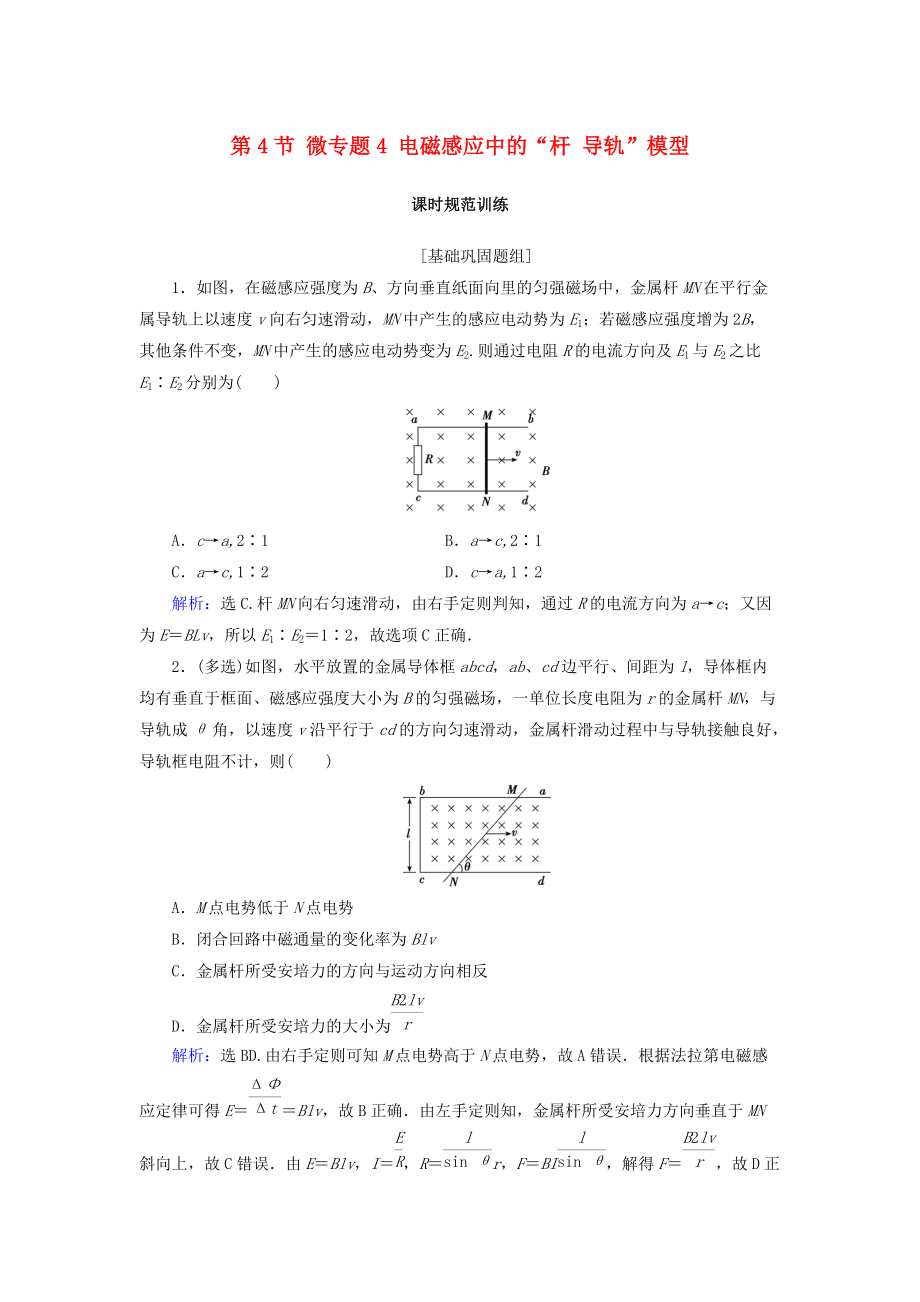
1.如圖��,在磁感應(yīng)強(qiáng)度為B��、方向垂直紙面向里的勻強(qiáng)磁場(chǎng)中��,金屬桿MN在平行金屬導(dǎo)軌上以速度v向右勻速滑動(dòng)��,MN中產(chǎn)生的感應(yīng)電動(dòng)勢(shì)為E1��;若磁感應(yīng)強(qiáng)度增為2B��,其他條件不變��,MN中產(chǎn)生的感應(yīng)電動(dòng)勢(shì)變?yōu)镋2.則通過(guò)電阻R的電流方向及E1與E2之比E1∶E2分別為( )
A.c→a,2∶1 B.a(chǎn)→c,2∶1
C.a(chǎn)→c,1∶2 D.c→a,1∶2
解析:選C.桿MN向右勻速滑動(dòng)��,由右手定則判知,通過(guò)R的電流方向?yàn)閍→c��;又因?yàn)镋=BLv��,所以E1∶E2=1∶2��,故選項(xiàng)C正確.
2.(多選)如
2��、圖��,水平放置的金屬導(dǎo)體框abcd��,ab��、cd邊平行��、間距為l��,導(dǎo)體框內(nèi)均有垂直于框面��、磁感應(yīng)強(qiáng)度大小為B的勻強(qiáng)磁場(chǎng)��,一單位長(zhǎng)度電阻為r的金屬桿MN��,與導(dǎo)軌成θ角��,以速度v沿平行于cd的方向勻速滑動(dòng)��,金屬桿滑動(dòng)過(guò)程中與導(dǎo)軌接觸良好��,導(dǎo)軌框電阻不計(jì)��,則( )
A.M點(diǎn)電勢(shì)低于N點(diǎn)電勢(shì)
B.閉合回路中磁通量的變化率為Blv
C.金屬桿所受安培力的方向與運(yùn)動(dòng)方向相反
D.金屬桿所受安培力的大小為
解析:選BD.由右手定則可知M點(diǎn)電勢(shì)高于N點(diǎn)電勢(shì)��,故A錯(cuò)誤.根據(jù)法拉第電磁感應(yīng)定律可得E==Blv��,故B正確.由左手定則知��,金屬桿所受安培力方向垂直于MN斜向上,故C錯(cuò)誤.由E=Blv,I=��,
3、R=r��,F(xiàn)=BI��,解得F=��,故D正確.
3.如圖所示��,兩根間距為l的光滑平行金屬導(dǎo)軌與水平面夾角為α��,圖中虛線下方區(qū)域內(nèi)存在磁感應(yīng)強(qiáng)度為B的勻強(qiáng)磁場(chǎng),磁場(chǎng)方向垂直于斜面向上.兩金屬桿質(zhì)量均為m��,電阻均為R��,垂直于導(dǎo)軌放置.開(kāi)始時(shí)金屬桿ab處在距磁場(chǎng)上邊界一定距離處��,金屬桿cd處在導(dǎo)軌的最下端��,被與導(dǎo)軌垂直的兩根小柱擋?�。F(xiàn)將金屬桿ab由靜止釋放��,金屬桿ab剛進(jìn)入磁場(chǎng)便開(kāi)始做勻速直線運(yùn)動(dòng).已知重力加速度為g��,則( )
A.金屬桿ab進(jìn)入磁場(chǎng)時(shí)感應(yīng)電流的方向?yàn)橛蒩到b
B.金屬桿ab進(jìn)入磁場(chǎng)時(shí)速度大小為
C.金屬桿ab進(jìn)入磁場(chǎng)后產(chǎn)生的感應(yīng)電動(dòng)勢(shì)為
D.金屬桿ab進(jìn)入磁場(chǎng)后��,金屬桿c
4��、d對(duì)兩根小柱的壓力大小為零
解析:選B.由右手定則可知��,金屬桿ab進(jìn)入磁場(chǎng)時(shí)產(chǎn)生的感應(yīng)電流的方向?yàn)橛蒪到a��,故A錯(cuò)誤��;因金屬桿ab剛進(jìn)入磁場(chǎng)便開(kāi)始做勻速直線運(yùn)動(dòng)��,則有mgsin α=��,解得v=��,故B正確��;金屬桿ab進(jìn)入磁場(chǎng)后產(chǎn)生的感應(yīng)電動(dòng)勢(shì)E=Blv��,解得E=��,故C錯(cuò)誤��;由左手定則可知��,金屬桿cd受到的安培力與斜面平行且向下��,則金屬桿cd對(duì)兩根小柱的壓力不為零��,故D錯(cuò)誤.
4.CD��、EF是兩條水平放置的電阻可忽略的平行金屬導(dǎo)軌��,導(dǎo)軌間距為L(zhǎng)��,在水平導(dǎo)軌的左側(cè)存在磁感應(yīng)強(qiáng)度方向垂直導(dǎo)軌平面向上的勻強(qiáng)磁場(chǎng)��,磁感應(yīng)強(qiáng)度大小為B,磁場(chǎng)區(qū)域的長(zhǎng)度為d��,如圖所示.導(dǎo)軌的右端接有一電阻R��,左端與一彎曲的
5��、光滑軌道平滑連接.將一阻值也為R的導(dǎo)體棒從彎曲軌道上h高處由靜止釋放��,導(dǎo)體棒最終恰好停在磁場(chǎng)的右邊界處.已知導(dǎo)體棒與水平導(dǎo)軌接觸良好��,且動(dòng)摩擦因數(shù)為μ��,則下列說(shuō)法中正確的是( )
A.電阻R的最大電流為
B.流過(guò)電阻R的電荷量為
C.整個(gè)電路中產(chǎn)生的焦耳熱為mgh
D.電阻R中產(chǎn)生的焦耳熱為mg(h-μd)
解析:選D.由題圖可知��,導(dǎo)體棒剛進(jìn)入磁場(chǎng)的瞬間速度最大��,產(chǎn)生的感應(yīng)電流最大��,由機(jī)械能守恒有mgh=mv2��,所以I===��,A錯(cuò)誤��;流過(guò)R的電荷量為q= t==��,B錯(cuò)誤��;由能量守恒定律可知整個(gè)電路中產(chǎn)生的焦耳熱為Q=mgh-μmgd��,C錯(cuò)誤��;由于導(dǎo)體棒的電阻也為R��,則電阻R中產(chǎn)
6��、生的焦耳熱為Q=mg(h-μd)��,D正確.
5.(多選)如圖所示��,足夠長(zhǎng)的“U”形光滑金屬導(dǎo)軌平面與水平面成θ角(0<θ<90)��,其中MN與PQ平行且間距為L(zhǎng)��,導(dǎo)軌平面與磁感應(yīng)強(qiáng)度大小為B的勻強(qiáng)磁場(chǎng)垂直��,導(dǎo)軌電阻不計(jì).金屬棒ab由靜止開(kāi)始沿導(dǎo)軌下滑��,并與兩導(dǎo)軌始終保持垂直且接觸良好��,ab棒接入電路的部分的電阻為R��,當(dāng)流過(guò)ab棒某一橫截面的電荷量為q時(shí),棒的速度大小為v��,則金屬棒ab在這一過(guò)程中( )
A.a(chǎn)點(diǎn)的電勢(shì)高于b點(diǎn)的電勢(shì)
B.a(chǎn)b棒中產(chǎn)生的焦耳熱小于ab棒重力勢(shì)能的減少量
C.下滑的位移大小為
D.受到的最大安培力大小為sin θ
解析:選ABC.由右手定則可知a點(diǎn)相
7��、當(dāng)于電源的正極��,b點(diǎn)相當(dāng)于電源的負(fù)極��,故A正確��;由能量守恒可知ab棒重力勢(shì)能的減少量等于ab棒中產(chǎn)生的焦耳熱與ab棒的動(dòng)能之和��,故B正確��;由q==可得��,下滑的位移大小為x=��,故C正確��;金屬棒ab在這一過(guò)程中受到的安培力大小為F=BIL��,I最大為��,故最大安培力大小為��,故D錯(cuò)誤.
6.(多選)如圖甲所示��,水平面上兩根足夠長(zhǎng)的金屬導(dǎo)軌平行固定放置��,間距為L(zhǎng)��,一端通過(guò)導(dǎo)線與阻值為R的電阻連接.導(dǎo)軌上放一質(zhì)量為m的金屬桿��,金屬桿��、導(dǎo)軌的電阻均忽略不計(jì)��,勻強(qiáng)磁場(chǎng)垂直導(dǎo)軌平面向下.用與導(dǎo)軌平行的恒定拉力F作用在金屬桿上��,桿最終將做勻速運(yùn)動(dòng).當(dāng)改變拉力的大小時(shí)��,金屬桿做勻速運(yùn)動(dòng)時(shí)的速度v也會(huì)變化��,v和F的關(guān)
8��、系如圖乙所示.下列說(shuō)法正確的是( )
A.金屬桿在勻速運(yùn)動(dòng)之前做勻加速直線運(yùn)動(dòng)
B.流過(guò)電阻R的電流方向?yàn)閍→R→b
C.由圖象可以得出B��、L��、R三者的關(guān)系式為=
D.當(dāng)恒力F=3 N時(shí)��,電阻R消耗的最大電功率為8 W
解析:選BD.金屬桿在勻速運(yùn)動(dòng)之前,隨著運(yùn)動(dòng)速度的增大��,由F安=可知金屬桿所受的安培力增大��,由牛頓第二定律可知金屬桿的加速度減小��,故金屬桿做加速度減小的加速運(yùn)動(dòng)��,選項(xiàng)A錯(cuò)誤��;由楞次定律可知��,流過(guò)電阻R的電流方向?yàn)閍→R→b��,選項(xiàng)B正確��;因?yàn)閳D象與橫軸交點(diǎn)等于金屬桿所受摩擦力的大小��,故由圖象可知金屬桿所受的摩擦力為Ff=1 N��,金屬桿勻速運(yùn)動(dòng)時(shí)有F-Ff=F安=��,
9��、則可得==��,選項(xiàng)C錯(cuò)誤��;當(dāng)恒力F=3 N時(shí)��,金屬桿受到的安培力大小為F安=F-Ff=2 N��,金屬桿勻速運(yùn)動(dòng)的速度為4 m/s��,所以金屬桿克服安培力做功的功率P=8 W��,轉(zhuǎn)化為電能的功率為8 W��,故電阻R消耗的最大電功率為8 W��,選項(xiàng)D正確.
[綜合應(yīng)用題組]
7. 如圖所示��,兩條足夠長(zhǎng)的平行金屬導(dǎo)軌相距L��,與水平面的夾角為θ��,整個(gè)空間存在垂直于導(dǎo)軌平面的勻強(qiáng)磁場(chǎng)��,磁感應(yīng)強(qiáng)度大小均為B��,虛線上方軌道光滑且磁場(chǎng)方向垂直導(dǎo)軌平面向上,虛線下方軌道粗糙且磁場(chǎng)方向垂直導(dǎo)軌平面向下.當(dāng)導(dǎo)體棒EF以初速度v0沿導(dǎo)軌上滑至最大高度的過(guò)程中��,導(dǎo)體棒MN一直靜止在導(dǎo)軌上��,若兩導(dǎo)體棒質(zhì)量均為m��、電阻均為R��,導(dǎo)軌
10��、電阻不計(jì)��,重力加速度為g��,在此過(guò)程中導(dǎo)體棒EF上產(chǎn)生的電熱為Q��,求:
(1)導(dǎo)體棒MN受到的最大摩擦力��;
(2)導(dǎo)體棒EF上升的最大高度.
解析:(1)EF獲得向上初速度v0時(shí)��,產(chǎn)生感應(yīng)電動(dòng)勢(shì)E=BLv0��,電路中電流為I��,由閉合電路的歐姆定律有
I=��,
此時(shí)對(duì)導(dǎo)體棒MN受力分析��,由平衡條件有
FA+mgsin α=Ff��,F(xiàn)A=BIL��,
解得Ff=+mgsin θ.
(2)導(dǎo)體棒EF上升過(guò)程MN一直靜止��,對(duì)系統(tǒng)由能的轉(zhuǎn)化和守恒定律有mv=mgh+2Q��,解得h=.
答案:(1)+mgsin θ (2)
8.如圖甲所示��,足夠長(zhǎng)的光滑導(dǎo)軌傾角為30��,間距L=1 m��,電阻不計(jì)��,
11��、恒定的非勻強(qiáng)磁場(chǎng)方向垂直于斜面向下��,電阻R=1 Ω��,導(dǎo)體棒ab質(zhì)量m=0.25 kg��,其電阻r=1 Ω,垂直于導(dǎo)軌放置.現(xiàn)導(dǎo)體棒ab從磁場(chǎng)上邊界由靜止下滑��,測(cè)得導(dǎo)體棒所到達(dá)位置的磁感應(yīng)強(qiáng)度B與導(dǎo)體棒在該位置速度之間的關(guān)系如圖乙所示��,(g取10 m/s2)
(1)求導(dǎo)體棒下滑2 s時(shí)的速度和位移��;
(2)求導(dǎo)體棒下滑2 s內(nèi)回路中產(chǎn)生的焦耳熱.
解析:(1)由題圖乙可知��,棒下滑的任意狀態(tài)有
B2v=0.5 T2ms-1
對(duì)棒下滑過(guò)程中某一狀態(tài)由牛頓第二定律得
mgsin 30-=ma
代入數(shù)據(jù)可得導(dǎo)體棒的加速度a=4 m/s2
可見(jiàn)導(dǎo)體棒在斜面上做a=4 m/s2的勻加速直線
12��、運(yùn)動(dòng)
棒在2 s內(nèi)的位移x=at2=8 m
2 s末的速度v=at=8 m/s
(2)由能量守恒得mgxsin 30=mv2+Q
代入數(shù)據(jù)解得Q=2 J.
答案:(1)8 m/s 8 m (2)2 J
9.如圖甲所示��,兩根足夠長(zhǎng)平行金屬導(dǎo)軌MN��、PQ相距為L(zhǎng)��,導(dǎo)軌平面與水平面夾角為α��,金屬棒ab垂直于MN��、PQ放置在導(dǎo)軌上��,且始終與導(dǎo)軌接觸良好��,金屬棒的質(zhì)量為m.導(dǎo)軌處于勻強(qiáng)磁場(chǎng)中��,磁場(chǎng)的方向垂直于導(dǎo)軌平面斜向上,磁感應(yīng)強(qiáng)度大小為B.金屬導(dǎo)軌的上端與開(kāi)關(guān)S��、定值電阻R1和電阻箱R2相連.不計(jì)一切摩擦��,不計(jì)導(dǎo)軌��、金屬棒的電阻��,重力加速度為g.現(xiàn)在閉合開(kāi)關(guān)S��,將金屬棒由靜止釋放.
13��、
(1)判斷金屬棒ab中電流的方向��;
(2)若電阻箱R2接入電路的阻值為0��,當(dāng)金屬棒下降高度為h時(shí)��,速度為v��,求此過(guò)程中定值電阻上產(chǎn)生的焦耳熱Q��;
(3)當(dāng)B=0.40 T��,L=0.50 m��,α=37時(shí)��,金屬棒能達(dá)到的最大速度vm隨電阻箱R2阻值的變化關(guān)系��,如圖乙所示.取g=10 m/s2��,sin 37=0.60��,cos 37=0.80.求R1的阻值和金屬棒的質(zhì)量m.
解析:(1)由右手定則可知��,金屬棒ab中的電流方向?yàn)橛蒪到a.
(2)由能量守恒定律知��,金屬棒減少的重力勢(shì)能等于增加的動(dòng)能和電路中產(chǎn)生的焦耳熱 ��,即mgh=mv2+Q
則Q=mgh-mv2.
(3)金屬棒達(dá)到最大速度
14��、vm時(shí)��,切割磁感線產(chǎn)生的感應(yīng)電動(dòng)勢(shì):
E=BLvm
由閉合電路的歐姆定律得:I=
從b端向a端看��,金屬棒受力如圖所示
金屬棒達(dá)到最大速度時(shí)��,滿足:
mgsin α-BIL=0
由以上三式得
vm=(R2+R1)
由圖乙可知:斜率
k= ms-1Ω-1=15 ms-1Ω-1��,
縱軸截距v=30 m/s
所以R1=v��,=k
解得R1=2.0 Ω,m=0.1 kg
答案:(1)b→a (2)mgh-mv2 (3)2.0 Ω 0.1 kg
10.如圖所示��,電阻不計(jì)��、間距L=1 m��、足夠長(zhǎng)的光滑金屬導(dǎo)軌ab��、cd與水平面成θ=37角��,導(dǎo)軌平面矩形區(qū)域efhg內(nèi)分布著磁感應(yīng)
15��、強(qiáng)度大小B=1 T��、方向垂直導(dǎo)軌平面向上的勻強(qiáng)磁場(chǎng)��,邊界ef��、gh之間的距離D=1.4 m.現(xiàn)將質(zhì)量m=0.1 kg��、電阻R= Ω的導(dǎo)體棒P��、Q相隔Δt=0.2 s先后從導(dǎo)軌頂端由靜止自由釋放��,P��、Q在導(dǎo)軌上運(yùn)動(dòng)時(shí)始終與導(dǎo)軌垂直且接觸良好��,P進(jìn)入磁場(chǎng)時(shí)恰好勻速運(yùn)動(dòng)��,Q穿出磁場(chǎng)時(shí)速度為2.8 m/s.已知重力加速度g=10 m/s2��,sin 37=0.6��,求:
(1)導(dǎo)軌頂端與磁場(chǎng)上邊界ef之間的距離s��;
(2)從導(dǎo)體棒P釋放到Q穿出磁場(chǎng)的過(guò)程��,回路中產(chǎn)生的焦耳熱Q總.
解析:(1)設(shè)P進(jìn)入磁場(chǎng)時(shí)的速度為v1��,由法拉第電磁感應(yīng)定律有E=BLv1
由閉合電路歐姆定律有I=��,安培力F=B
16��、IL��,
P勻速運(yùn)動(dòng)有F=mgsin θ��,聯(lián)立解得v1=2 m/s��,
P從ac到ef過(guò)程,由牛頓第二定律有a=gsin θ��,由運(yùn)動(dòng)學(xué)公式有s=��,
解得s= m≈0.33 m.
(2)P進(jìn)入磁場(chǎng)以速度v1勻速運(yùn)動(dòng)��,Δt=0.2 s后��,Q恰好進(jìn)入磁場(chǎng)��,速度也為v1=2 m/s.之后��,P��、Q以加速度a勻加速運(yùn)動(dòng)��,P出磁場(chǎng)以后繼續(xù)以加速度a勻加速運(yùn)動(dòng)��,而Q在安培力作用下減速運(yùn)動(dòng)��,直到穿出磁場(chǎng)區(qū)域.
P在磁場(chǎng)中勻速運(yùn)動(dòng)的位移x1=v1Δt��,
此過(guò)程回路產(chǎn)生的焦耳熱Q1=mgx1sin θ��,
P��、Q一起勻加速運(yùn)動(dòng)的位移x2=D-x1��,
設(shè)P剛好出磁場(chǎng)時(shí)��,P��、Q的速度為v��,由運(yùn)動(dòng)學(xué)公式有v2-
17��、v=2ax2��,解得v=4 m/s��,
P出磁場(chǎng)后Q做減速運(yùn)動(dòng)��,Q出磁場(chǎng)時(shí)的速度v2=2.8 m/s��,運(yùn)動(dòng)的位移x3=x1��,
Q減速運(yùn)動(dòng)過(guò)程中回路產(chǎn)生的焦耳熱Q2=mgx3sin θ+mv2-mv��,所以��,全過(guò)程回路中的焦耳熱為Q總=Q1+Q2=0.888 J.
答案:(1)0.33 m (2)0.888 J
6EDBC3191F2351DD815FF33D4435F3756EDBC3191F2351DD815FF33D4435F3756EDBC3191F2351DD815FF33D4435F3756EDBC3191F2351DD815FF33D4435F3756EDBC3191F2351DD815FF33D4435F3756EDBC3191F2351DD815FF33D4435F375
 高考物理大一輪復(fù)習(xí) 第10章 電磁感應(yīng) 第4節(jié) 微專題4 電磁感應(yīng)中的“桿 導(dǎo)軌”模型課時(shí)規(guī)范訓(xùn)練
高考物理大一輪復(fù)習(xí) 第10章 電磁感應(yīng) 第4節(jié) 微專題4 電磁感應(yīng)中的“桿 導(dǎo)軌”模型課時(shí)規(guī)范訓(xùn)練